
Ahogy korábban írtam, a PID beállítás az egyik olyan terület, ami minden kezdőnek komoly kihívást jelent és sokaknak el is veheti a kedvét az egész repüléstől, illetve jelentősen megnehezíti a tanulást egy nem jól beállított géppel.
A CC3D több alapbeállítást is ajánl, amelyek közül a QAV250-es működni szokott a legtöbb 250-es géppel. Repülni tehát lehet vele, de koránt sem ideális.
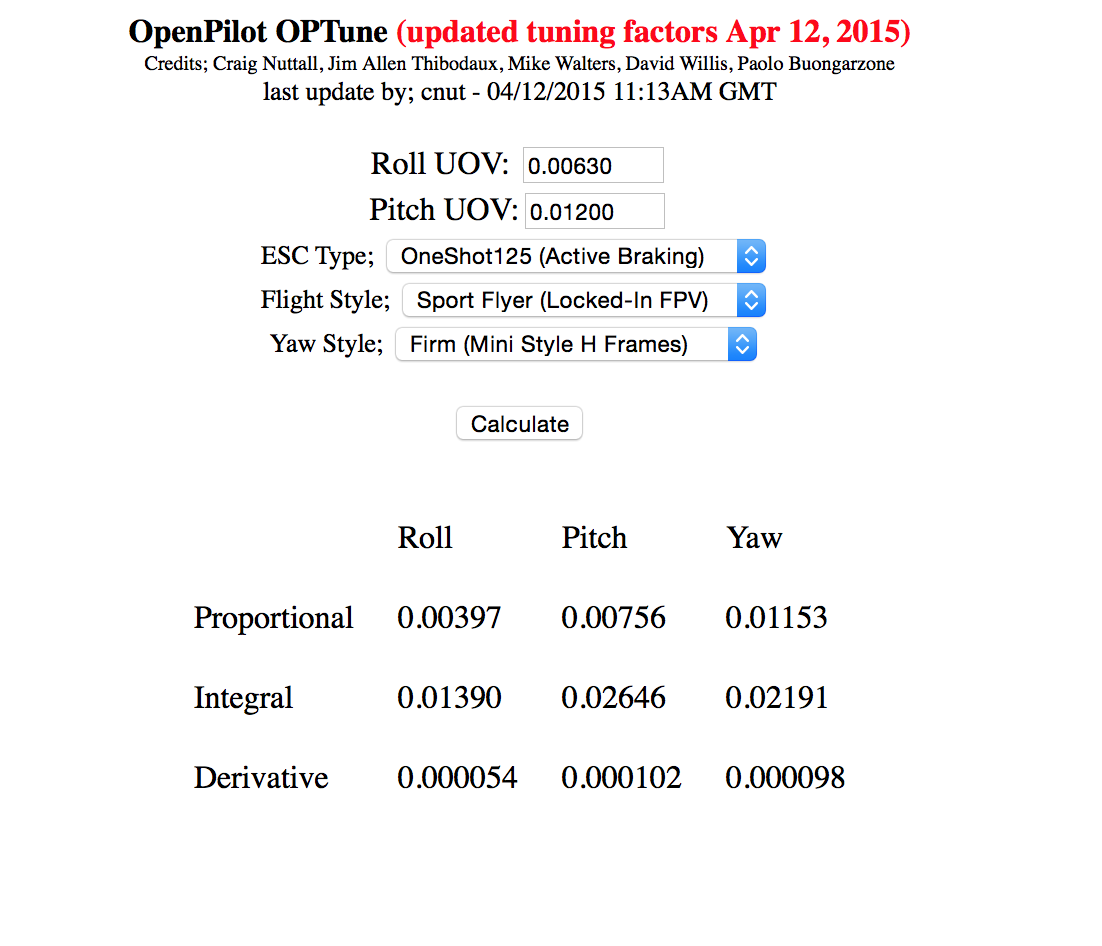
Annak érdekében, hogy könnyebbé tegyék az első PID hangolást, az OpenPilot közösség kialakította az ugynevezett Optune PID hangolási módszert.
Az Optune lényege, hogy a Roll és Pitch tengelyek speciális P értékét megállapítva kiszámolja mindhárom tengelyre az összes P-I-D paramétert, amelyek elég megbízhatóan fognak működni. Bár valószínűleg ez sem a teljesen tökéletese megoldás minden egyes egyedi kopter számára, de az alapbeállításoknál biztosan jobb közelítést ad és jó kiindulási pont a további manuális tunninghoz.
A hangolás lényege, hogy a PID értékeket egy előre megadott alapértékre állítjuk (lényegében az I és D-t kinullázzuk és a P-re egy alapértéket adunk), majd innen kiindulva, először az egyik (Roll vagy Pitch, igazából mindegy) P értéket növelve meghatározzuk az UOV-t (unique oscillation value, azaz egyedi oszcillációs érték), azt az értéket, amelynél a kopter egy egyenletes – se nem gyorsuló, se nem lassuló – rezgést produkál.
Ha mondjuk a Roll P érték megvan, akkor újra visszaállítunk mindent és most a Pitch tengely P értékét növelve meghatározzuk a Pitch UOV-t is.
Ezek után nincs más dolgunk, mint a két kapott értéket beírjuk az Optune kalkulátorba, megadjuk a quadunk alapparamétereit és máris megkapjuk az összes PID értéket mindhárom tengelyre. Ezeket bepötyögjük a GCS-be és kész. Nem is olyan bonyolult, igaz? :)
A dolog trükje, hogy miként állítjuk a P értéket az aktuális tengelyen, hogy elérjük az UOV-t. Lehet manuálisan is. Állítunk a P-n, repülünk, majd leszállunk, csatlakoztatjuk a GCS-t, újra állítunk a P-n, majd újra repülünk és ezt addig ismételjük, amíg el nem érjük a kívánt rezgést.
Sokkal egyszerűbb azonban, ha a távirányítónkon a potmétert vagy csuszkát felkonfigurálunk egy szabad csatornára és a CC3D TxPID modulját aktiválva repülés közben, valós időben állítjuk a kívánt P értéket a poti segítségével. Így kb. 1-2 perc alatt meg lehet határozni az UOV-t.
Itt most nem megyek bele a részletekbe, mert az OpenPilot forumokon minden le van írva, de ha igény van rá, később pontosan le tudom írni, hogy kell a TxPID-et felkonfigurálni GCS-ben.
Az egész Optune folyamat részletesen le van írva az openpilot forumon itt.
A FunFly FPV csatorna mostanában posztolt egy YouTube video guide-ot is a a folyamatról, itt érhető el:



