
Jó régen írtam már bejegyzést, részben idő hiányában, részben pedig azért, mert a borzalmas idő miatt nem igazán lehet repülni, így nem is történik olyna sok minden, azonkívül hogy egy-két hetente ugrok pár BetaFlight verziót.
Most találtam egy olyan témát, ami azt hiszem többeket - különösen még a hobby elején járókat - foglalkoztatja. Ez pedgi az akkumulátor kérdés.
Egy ma már ősréginek tűnő, de egyébként továbbra is releváns tavalyi bejegyzésben tárgyaltam a LiPo akksi alapokat. Ezt a bejegyzést azoknak szánom, akkik azért már tudják, eszik-e, vagy isszák a Lithium-Polymert és tisztában vannak a cellaszám és a C-ráta fogalmával.
Ma a miniquadok dőntő részében 3S (3 cellás), vagy 4S LiPo akkumulátorokat használunk. Vannak persze extrém példák 6 cellás akksikkal való "kísérleti" repülésekre, de ezek tényleg unikumnak számítanak.
A 3 és 4 cellás akksik közötti fő különbség egy részről a feszültség, más részről persze a fizikai paraméterek, mint a méret és a súly. A 4 cellás akksik a magasabb feszültségnek köszönhetően sokkal nagyobb teljesítményt tudnak leadni, ami jóval gyorabb, agresszívabb repülésben nyilvánul meg. Cserébe nagyobbak és nehezebbek, azaz a gépnek több súlyt kell vinni, illetve a fizikai elhelyezésük is kihívás lehet egyes gépeken. A LiPo akksik cellánkénti névleges feszültsége 3.7V, maximális töltöthetősége 4.2V. Egy 3S akksi teljesen feltöltve 12.6V a 4 cellás LiPo pedig 16.8V. Szabad szemmel is jól látható a különbség, de a gép teljesítményében még brutálisabban érződik.
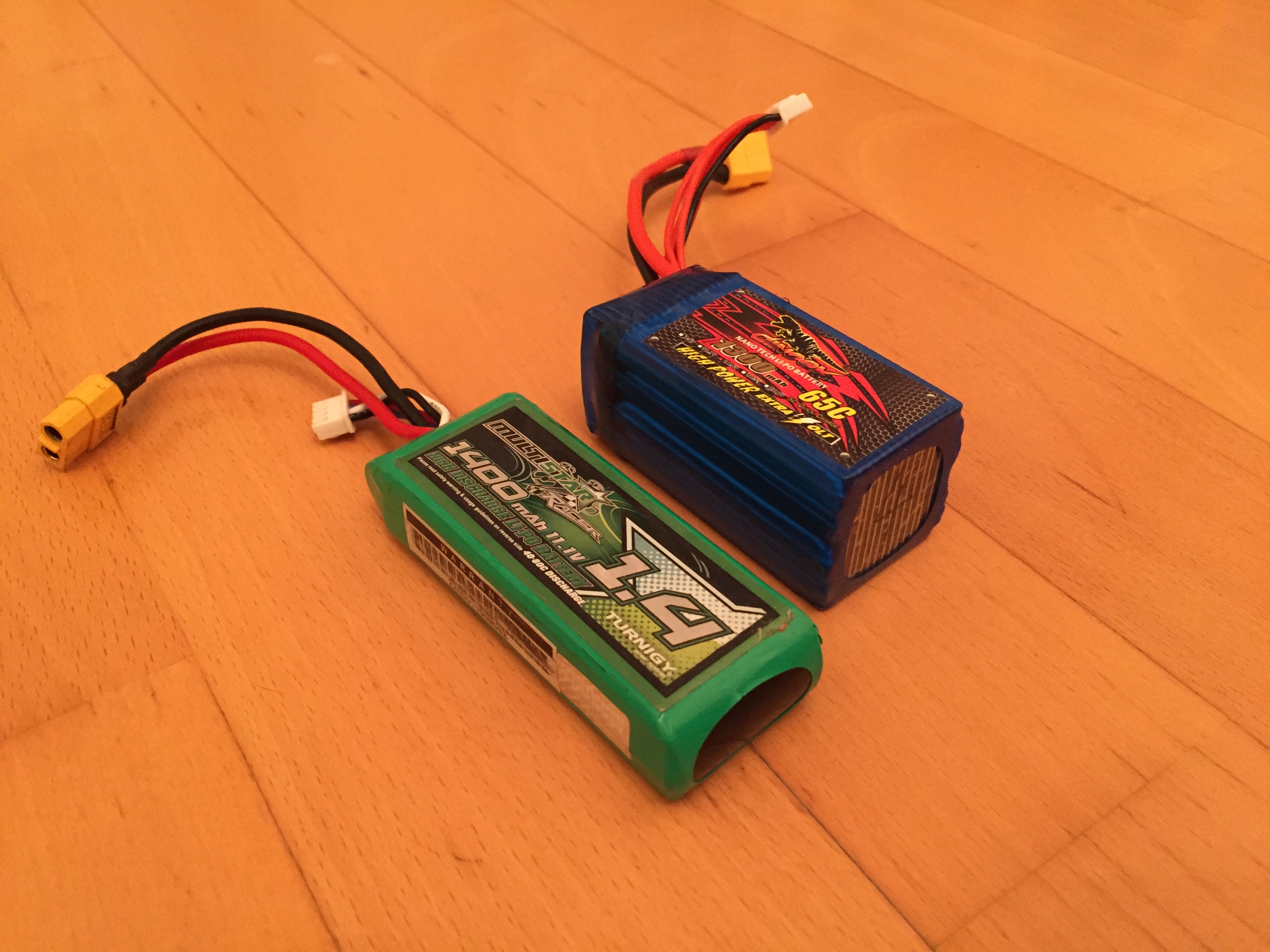
Turnigy Multistar Racer 1400mAh 40C 3S és a Dinogy 1300 mAh 65C 4S akksik. Látszik a méretbeli különbség, de azért ez részben a Dinogy magasabb C értékének is betudható.
Amikor egy éve elkezdtem tervezni az első saját építésű quadomat, még az volt a mondás, hogy építsd csak 3S-sel, mert az elég lesz tanulni. Továbbá, én akkor úgy akartam építeni a gépet, hogy az akksit belülre tudjam elehlyezni, amihez a kisebb 3S akksik jobban jöttek. Igyekeztem persze olyan filozófiával építeni a gépet, hogy majd később át tudjam alakítani 4S képesre, de utólag kiderült, hogy ez nem teljesen sikerült. Szóval most itt van a gép darabokban, mert cserélnem kell az ESC-ket, hogy elbírja a 4S akksikat. Az akksit pedig amúgy sem volt túl jó ötlet belülre elhelyezni, mert egy részről nem lehet a gravitációs középpontot jól kiegyensúlyozni úgy, más részről, ha bent elkezd csúszkálni, könnyen megrongálhat más kényesebb alkatrészeket is.
Milyen akksival kezdjünk? Hogy építsük meg az első gépet?
Mai fejjel mindenkinek azt javasolom, hogy a gépet mindenképpen 4S működésre optimalizáltam építse. Hogy miért? Mert egy 4S géppel simán lehet 3S akksit haszálni, fordítva pedig ez nem igaz. A költségszintben ma már nincs döntő különbség. lehet, hogy összesen talán 10-15 dollár meg lehet spórolni kisebb ESC-kell, vagy egy feszültségszabályozó elhagyásával, de ha majd oda jutunk, hogy mégis 4S akksit szeretnénk használni, akkor sokkal nagyobb gond és költség lesz az átalakítás.
Érdemes-e egyálatlán 3S akksival kezdeni? Nehéz kérdés. Talán igen, hiszen elsőre, 3S-sel a gép jobban kezelhető, nem annyira gyors, nem annyira agresszív. Cserébe azonban nincs is meg benne az az ütősség, ami mondjuk egy süllyedő manőver határozott megállításához kell. Én sokkal kevesebbszer "akadok el a fűben", amióta 4S akksit használok. Ha valaki óvatos és tart kicsit a quadtól, semmi gond nincs azzal, ha 3S akksival kezd el gyakorolni. Ez esetben sem érdemes azonban 3S akksik tucatjába beruházni, mert azt garantálom, hogy néhány hét, vagy hónap (vagy mondjuk összesen 10-15 repült óra) gyakorlás után már mindenképpen igényelni fogjátok a 4S akksik erejét. Éppen ezért elég sok eladó 3S akksi van, nyugodtan lehet az elején olcsón venni 3-4 darab használt 3S akksit és akkor sokkal kisebb lesz a bukó, amikor majd 4S-re váltotok.
Ha azonban úgy érzitek, hogy képesek vagytok ellenállni a késztetésnek, hogy a gázkart lépten-nyomon fullra toljátok, akkor az én véleményem szerint nyugodtan be lehet vállalni rögtön a 4S akksival való kezdést. Csak megfelelő tisztelettel kell vele bánni és nem egyből csutkázni gázkart. Egy Porschéval is lehet ugy lassabban is menni...
Áttérés 3S-ről 4S-re
Ha 3S akksival kezdtetek és eljött az idő a 4S-re történő áttérésre, akkor a következő dolgokat kell leellenőrizni, illetve megváltoztatni. (Ha pedig valaki egyből 4S képes gépet akar építeni, akkor ezekre már eleve figyeljen!)
Ellenőrizni kell az összes olyan alkatrész hivatalos besorolását, amely közvetlenül a LiPo tápfeszöltségre csatlakozik, beleérvtve magát a PDB-t is (bár ez ma már nem hiszem, hogy bárhol gond):
- PDB
- ESC-k (18A-20A ESC javasolt)
- Motorok! (Itt kitérnék arra, hogy pl. a Cobra 2204/2300-as motor 3S-re van besorolva, de mindenki vidáman használja 4S-sel is)
- Videóadó (VTx)
- FPV kamera (ha nem a VTx-ről kapja a dszúzt)
- LED csíkok
- Az újabb repülésvezérlők már beépített tápegységgel rendelkezhetnek. Amelyik ilyen, az szinte biztosan jó legalább 5S-ig, de azért érdemes ezt is lecsekkolni.
Itt külön kitérnék a Videóadóra, illetve az FPV kamerára. Itt rengeteg modell van és sok olyan VTx, illetve kamera van, amely 12V-os feszültséget igényel. Ezek általában még a 3S akksik 12.6 Voltját elviselik, a 4S 16.8V-ja már biztosan sok nekik. Ilyen esetekben valamilyen feszültségszabályozóra (step-down modul) van szükség, amely leosztja a magasabb feszültséget és egy stabil 12V-ot biztosít az eszközökenk. Ilyen modult pár dollárért lehet vásárolni, de ma már sok olyan PDB van, amely alapból biztosítja ezeket a kimeneti feszülségeket.
Egy Pololu 12V-os kimeneti feszültségű áramleosztó (setp-down), akár 42V bemenetet is bír és 600mA-t nyújt
Az FPV kamerát még akkor sem javaslom közvetlenül a PDB-re kötni, ha egyébként 5-17V működési feszültséget mond a gyártó, mert egyrészt zavarok jelenhetnek meg a képen, más részről az erős fékezésű ESC-k által keltett feszültség-tüskék könnyen leégethetik. Ha olyan VTx-ünk van amely tudja biztosítani a megfelelő tápellátást a kamerának, akkor az a legjobb megoldás. Egyébként pedig erre is használhatunk valamilyen feszültség-szabályozót.
A másik dolog, amivel foglalkoznunk kell 4S meghajtásra való áttéréskor, az a vezérlő szoftver. Először is a PID-jeinket biztos hogy lejebb kell venni. Ehhez javaslom a CleanFlight/BetaFlight alapbeállításait, mint kiindulópont, aztán onnan lehet tovább hangolni a rendszert. Más részről, érdemes ránézni a vezérlő belső feszültségmérésére (Vbat), már ha használjuk, hogy nem csúszott-e el a skálázás.
Ezen kívül, ha használunk telemetriát a rádiónkon, akkor ott is érdemes ellenőrzni az alacsony feszültség-jelzés beállításait, hogy megfelelően működjenek.
C-ráta
Az utóbbi időben több elemzés jelent meg arról, hogy a gyártók által feltüntetett C értékekt nem feltétlenül tükrözik a valóságot. Biztosat tényleg csak akkor tudunk mondani, ha magunk is kipróbáltuk, illetve utánanéztünk az Interneneten elérhető számos tesztnek és összehasonlító-videónak. Általában igaz, hogy a drágább akksik jobbak, de persze vannak kivételek. Én ökölszabályként azt javasolnám, hogy minimum 50C értékű akksikat válasszatok (ha tartomány van megadva, akkor az alsó érték legyen 50C, pl.: 50C - 100C). Azokkal általában annyira nem lehet mellényúlni.
Na, most már jöhet a jóidő. :)




