
A váz kiválasztása után a következő nagy kihívás a repülésvezérlő modul (Flight Controller, FC) kiválasztása volt. Itt a vázakkal ellentétben nem a túl széles kínálat okozott problémát, hanem az, hogy a két legelterjedtebb modell között a különbségek elhanyagolhatóak és itt mindennél jobban egyéni ízlésre, véleményekre és megérzésre alapozhat az ember. De ne ugorjunk ennyire előre.
A repülésvezérlő modul a multikopter (és egyébként a legtöbb távirányítású repülő eszköz) agya. Ez a modul, amely érzékeli a repülési paramétereket, feldolgozza a távirányító rádióról érkező parancsokat és ezek ismeretében vezérli esetünkben a 4 motor forgási sebességét.
Ez a multikopter nem az a multikopter
Első nekifutásra a DJI által gyártott NAZA modulokat kezdtem nézegetni, hiszen mégiscsak ők a piacvezetők a multikopterek piacán, de aztán hamar kiderült számomra, hogy jelentős különbség van a légi videózásra és egyéb ipari tevékenységre használt gépek és az FPV versenygépek között. Az előbbieknél nagyon komoly jelentősége van a GPS jelfeldolgozásnak, a barométertől és egyéb szenzoroktól kapott információk feldolgozásának és ezek alapján hozott autonóm döntéseknek. Ellenben ezek a vezérlők igen "lomhán" teljesítenek, ha a drónunkkal, versenyezni, illetve csak "zúzni" szeretnénk egyet, vagy akrobatikus manővereket hajtanánk végre.
A mini drónok esetében lényegében semmi szükség GPS-re, barométerre és egyéb szofisztikált szenzorokra, viszont szükség van pontos és gyors gyroscopra és dinamikus motorsebességvezérlő-mechanizmusra.
Az élboly
Kutakodásom során elég hamar rájöttem, hogy a ma épített minidrónok 90+ %-ába a két legnépszerűbb FC egyikét építik be. Ezek pedig az OpenPilot CC3D, illetve a Naze32 Acro (FunnyFly néven is fut, itt fontos megjegyezni, hogy létezik egy Full Naze32 verzió, amely barométert és tájolót is tartalmaz a lapkán). Belefutottam még a KK 2.1 és Flip 32 modulokba is, de azt látom, hogy ezek részesedése folyamatosan csökken ebben a géposztályban.
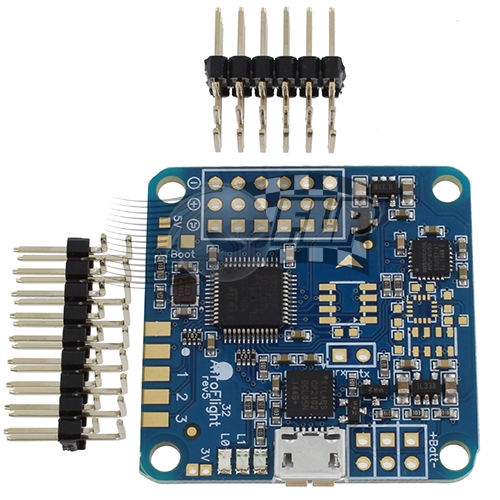
A két vezérlő (CC3D és Naze32 Acro) hardveresen szinte teljesen egyforma. Azonos 32-bites multiprocesszorra és lényegében ugyanazokra szenzorokra épülnek. Még méretük is teljesen megegyezik (36x36 mm) és most már mindkettőből létezik egy kb. fele ekkora, de teljes funkcionalitású verzió is (Atom, ill. Mini néven). A különbség tehát nem a hardverben, hanem a szoftverben keresendő.
 |
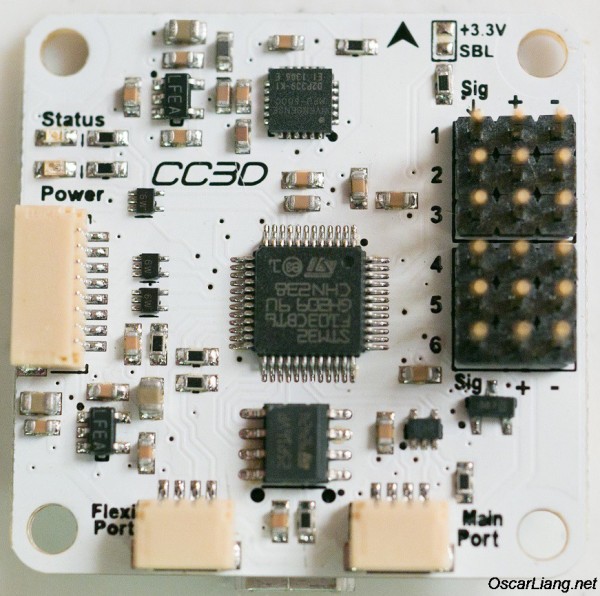 |
Balra a Naze32 Acro, jobbra a CC3D
Mindkét szoftver nyílt forráskódú, ennek megfelelően a frissítések is ingyenesek. Ennek azért van óriási jelentősége, mert a multikopter terület olyan gyors a fejlődés, hogy pár havonta jönnek ki újabb és újabb szoftververziók, amelyek fejlettebb, jobb vagy egyszerűen csak új funkciókkal rendelkeznek.
A CC3D mögött az OpenPilot szerveződés áll. A Naza32 pedig a hagyományos MultiWii platformból és a BaseFlight vezérlő szoftverből nőtt ki. A legfontosabb funkciók tekintetében, mindkét vezérlő 8 csatornás RF vevőt, illetve a modernebb PPM (multiplex) vezérlést is támogat. Emellett 6 motorvezérlő kimenettel rendelkezik, több repülési módot is támogat, USB (mini, ill. micro) porton keresztül konfigurálható és még az akkufeszültséget is méri. Az ESC-k csatlakoztatására mindkét vezérlő rendelhető egyenes, illetve oldalt álló csatlakozó tüskékkel, illetve a Naze32 egyedileg otthon beforrasztandó tüskékkel is kérhető, így nyújt némi plusz rugalmasságot az összeépítés során.
A vezérlők konfigurációja mindkét esetben száítógép csatlakoztatásával, grafikus felületen (GUI) keresztül történik, a CC3D esetében a Ground Control Station (GCS), míg a Naze32 estében a BaseFlight Configurator szoftverrel történik. És itt már azért előjönnek a különbségek, amelyek segítenek dönteni, de az biztos, hogy mindkét szoftver számtalan beállítási, konfigurálási lehetőséget nyújt a quadcopterünk és a rádió-vezérlőnk teljesen egyedi igények szerint történő beállításához.
Hogy válasszunk?
A repülésvezérlő kiválasztása az egyik legnehezebb feladat volt számomra. Hiába olvastam utána, arra jutottam, hogy a legtöbb vélemény erősen szubjektív. Ha valaki a Naze32-őt szokta meg, akkor ő azt fogja javasolni, míg mások a CC3D-vel vannak ugyanígy. Egyes vélemények szerint a Naze32 sokkal precízebb ("locked in") irányítást tesz lehetővé, míg mások szerint a CC3D szoftvere sokkal felhasználóbarátabb. Ráadásul ezek a vélemények általában még a szoftverek korábbi verzióin alapulnak, így lehetetlen a legfrissebb verziókat objekíven összehasonlítani.
Összességében az a benyomásom, hogy a Naze32-öt inkáb a "hardcore" kopteresek kedvelik, akik már egy ideje a "szakmában" vannak. A CC3D mögött viszont sokkal több gyártó áll, hiszen lényegében minden RTF kit-ben CC3D vezérlő van, ideértve a Lumenier és a BlackOut kit-eket is.
A másik fontos szempont, hogy a látott videók alapján én a CC3D-hez tartozó Ground Control Station-t jobbnak láttam, mint a BaseFlight Configuratort. Nagyon profi wizardos (varázslós) setup asszisztense van és minden beállítást jól érthetően lehet változtatni. A BaseFlight esetén van egy-két olyan teljesen alapvető paraméter, amelyhez mindenképpen szükséges a karakteres parancssor (CLI, command line interface) használata, amit őszintén szólva egyáltalán nem értek. (Bár informatikusként nem ijedek meg a CLI-től!)
A másik - a változatosság kedvéért teljesen személyes - érvem a CC3D mellett a jobb Apple Mac támogatás volt. A GCS Mac-es verziója direktben tölthető és egyből használható a legújabb OS X verzión is. A BaseFlight Configurator is platformfüggetlen ugyan és mint ilyen futtatható Mac-en, de külön driverek telepítését igényli, amely a fórumok szerint nem minden esetben zökkenőmentes.
Én tehát a CC3D mellett döntöttem, annak is az ATOM névre keresztelt mini-verziója mellett, amely még könnyebb és még kisebb helyet foglal a vázon. Mivel a CC3D OpenPilot szoftverének 2015-ben már két újabb verziója is kijött, biztos vagyok benne, hogy ha vannak is vezérlés-pontossági lemaradásai a Naze32 mögött, azokat nagyon hamar le fogják dolgozni és legalább pariban lesz a két vezérlővel elérhető repülési élmény.
A következőkben a motorokkal és a elektronikus sebesség-szabályozókkal foglalkozom majd.



