Az utóbbi időben rengeteg fejlesztés történt az ESC-k szoftverei területén. (akinek az ESC kifejezés nem mond semmit, előbb olvassa el ezt). Elterjedőben van a OneShot125 kommunikációs szabvány és lehetőség van az active braking alkalmazására is. (Ezekről talán majd egy külön posztban).
Hagyományosan a SimonK firmware volt a legkedveltebb a miniquadok estén, de az utóbbi egy évben a BLHeli beelőzni látszott, mivel előbb kezdte el támogatni a fent említett funkciókat. Mostanra azonban már a SimonK is felzárkózott, így most leginkább megint ízlés (és persze ESC) kérdése, hogy ki melyiket választja.
Én az Afor ESC 12A Ultra Lite V3 szabályozóimmal, amelyeken alapból is SimonK firmware volt, maradtam is ezen a platformon, habár maga a hardver képes a BLHeli fogadására is. Ki tudja, majd egyszer talán azt is kipróbálom.
Az ESC-ken általában vagy ATMega, vagy Silabs chipet helyeznek el. Ezek programozása hagyományosan egy kicsit körülményes volt, hiszen le kellett vágni a burkolatot és nehezen megközelíthető helyen kellett csatlakozni a lapkán lévő miniatűr csatlakozókhoz. Szerencsére az utóbbi időben ezeket a szabályozókat már egy bootloaderrel is ellátják, így lehetőség van az eszköz programozására a szervó csatlakozón keresztül, ami azért nagyságrendekkel felhasználóbarátabb megoldás.
Tipikusan a SimonK bootloaderrel ellátott chippek képesek SimonK és BLHeli firmwaret is fogadni, míg a BLHeli booatlodaer csak a BLHeli firmware-t támogatja.
A programozáshoz szükség van egy USB Linkerre, esetemben az Afro USB Programming Toolra (de egyébként lehetne Turnigy Linker, vagy bármi más, ami ugyanezen az alapon működik). Ezen kívül szükség van egy programozó interface-re, azaz egy alkalmazásra. BLHeli esetében ez a BLHeli Suite, de mivel én a SimonK mellett maradok, ezért erről többet itt most nem írok.
SimonK firmware frissítéshez hagyományosan a KK Multicopter Flashtoolt szokták használni, ami ugyan a KK vezérlőt flash-selésére lett kitalálva, de kiválóan boldogul az ESC-kkel is. Én találtam azonban egy számomra szimpatikusabb és egyszerűbb eszközt, amely flashselés közben a paraméterek változtatását is lehetővé teszi. Ez pedig a RapidFlash.
Most már minden rendelkezésre áll az ESC flasheléséhez.
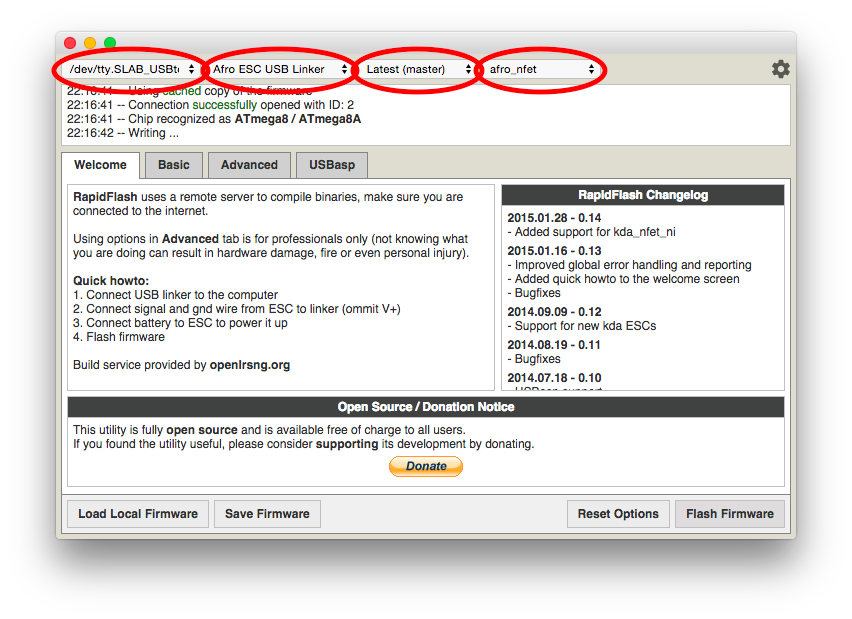
- Telepítsük a szoftvert a fenti linkről. Windows esetében szükség lesz Silabs virtuális soros port driverekre is. Mac esetében elvileg nem, de nekem anélkül nem ismerte fel az Afro Tool-t, úgyhogy érdemes feltenni a legfrissebbet innen. Dugjuk be a programozó adaptert az egyik USB portba. A RapidFlash-et elindítva ki kell tudnunk választani az USB to UART interface-t a listából.
- Készítsük elő a quadot. Az ESC-k szervócsatlakozóit húzzuk le a repülésvezérlőről (figyeljünk a sorrendre, nehogy egy kimaradjon a programozásból és hogy később megfelelő sorrendben dugjuk vissza őket). A motorokat nem kell lekötni, de elővigyázatosságból javasolt a propellerek leszerelése.
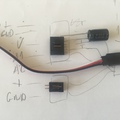
- Az ESC szervócsatlakozóból a középső piros (pozitív, V+) vezetéket távolítsuk el, hogy csak a föld és a jel vezeték maradjon.
- Csatlakoztassuk az ESC vezetéket az USB adapterhez. Figyeljünk a polaritásra!
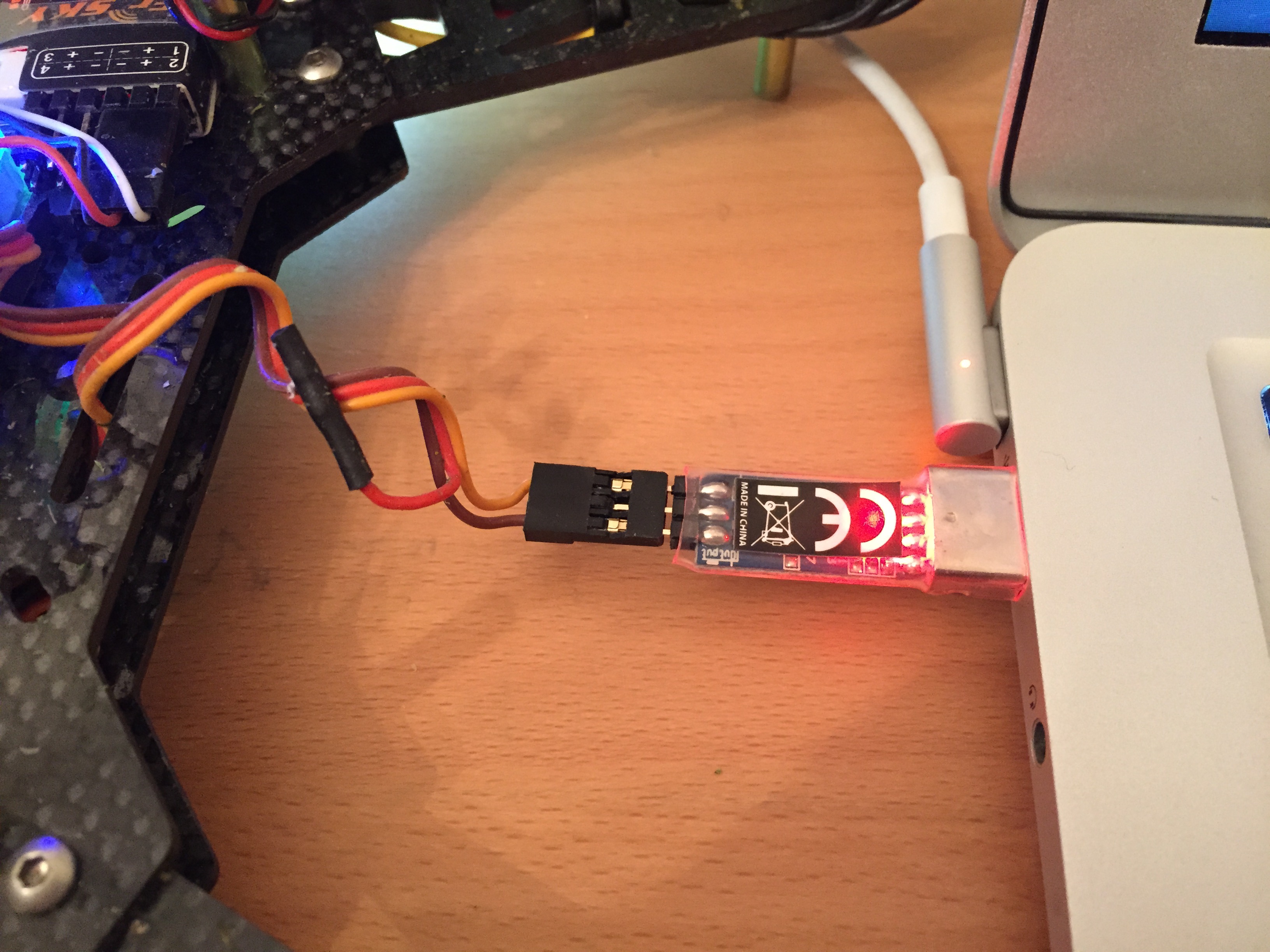
5. Adjunk áramot az ESC-nek, tipikusan a fő repülési akksi csatlakoztatásával.
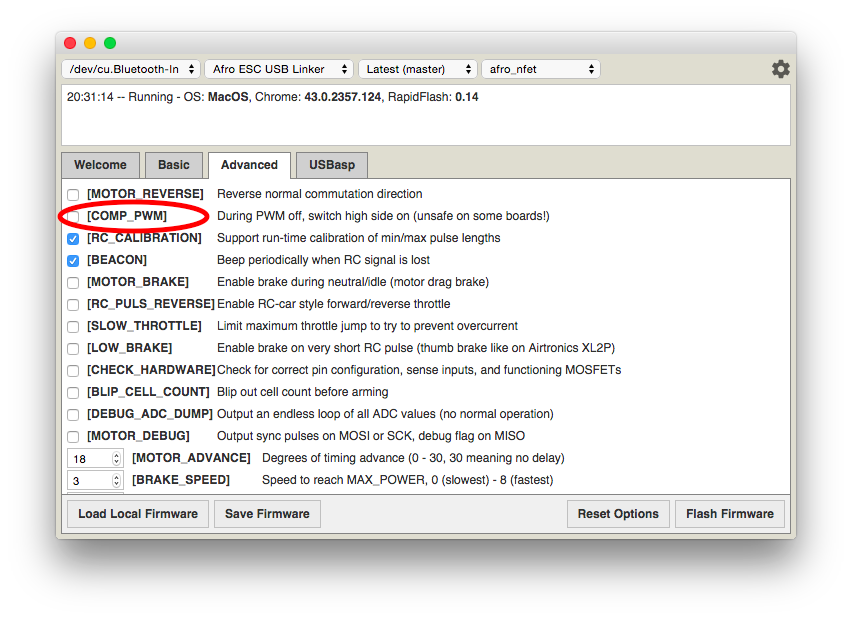
6. A szoftverben válasszuk ki a megfelelő beállításokat, mind az első oldalon, mind pedig az Advanced fülön, ha például szeretnénk aktív fékezést. SimonK esetében itt a "Comp_PWM" checkboxot kell beklikkelni.
 |
 |
7. Nyomjuk meg a Flash Firmware gombot.
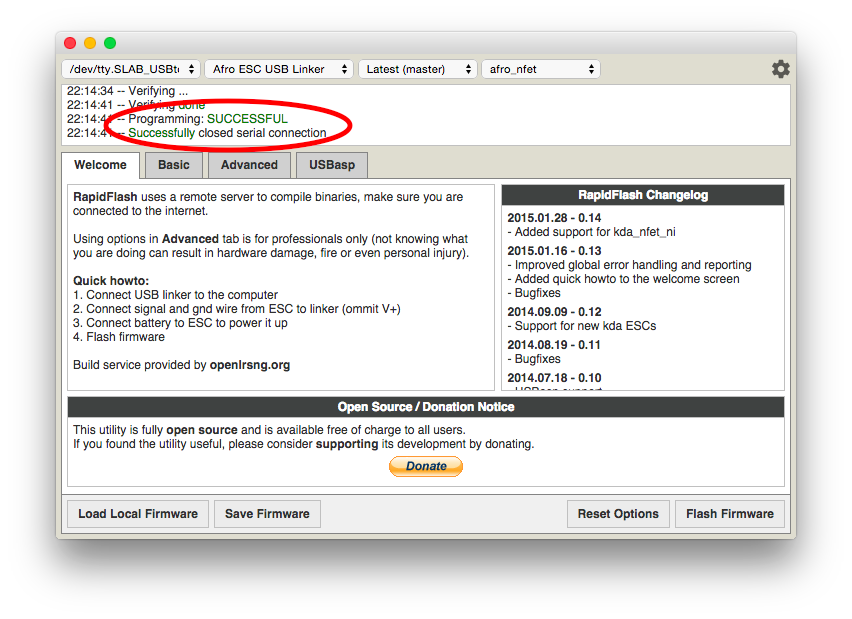
8. A folyamat automatikusan letölti a kiválasztott (javasoltan a legfrissebb) firmwaret, majd csatlakozik az ESC-hez, feltölti az új firmwaret és leellenőrzi azt. Ha a végén azt látjuk, hogy Programming Succesful, akkor sikeresen feltoltuk az új firmware-t.
9. Ismételjük meg ezt a műveletet a másik 3 ESC-vel is.
10. Kössük le az akksit, majd szépen szereljük újra össze a quad-ot.
És ezzel meg is vagyunk. Ha CC3D vezérlőt használunk és eddig nem OneShot125 képes firmware-t használunk, akkor további teendőnk van, mert át kell konfigurálni a repülésvezérlőt is.
CC3D bekonifugárálása OneShot125 használatához
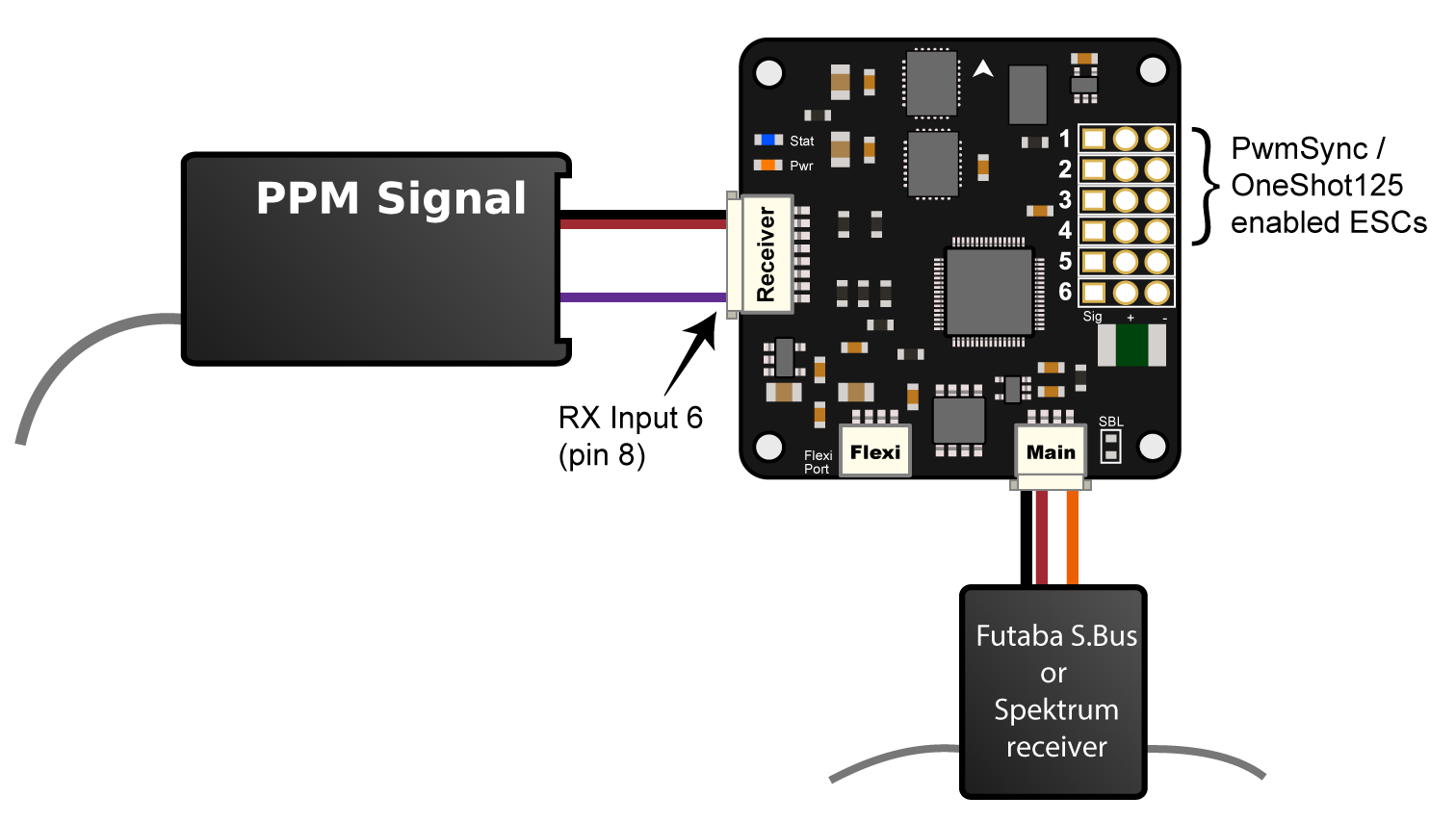
A CC3D vezérlő másképp kezeli a OneShot125 képességgel megáldott ESC-ket, mint a "sima" RapidESC-ket. Kezdjük azzal, hogy csak és kizárólag PPM Sum módban hajlandó ezeket kezelni, tehát, ha valaki PWM módot használt, akkor át kell térnie a PPM-re, amikor az összes csatorna jele csak egy vezetéken megy át. Ha már korábban is PPM-et használt, de nem OneShot ESC-vel, akkor a jel a 3-as PIN-en ment, most viszont a 8-as PIN-en fog menni. Ha az összes vezeték amúgy be van kötve, akkor ez nem gond. Én viszont kivettem azt az 5 vezetéket, amelyet nem használok, ezért nekem a csatlakozóban is át kellett helyeznek a tüskét a 3-asból a 8-as pozícióba.
Ha ez megvan, akkor talán a legjobb újra lefuttatni a Hardware setup Wizardot. A beállításokat nem kell törölni, de egyébként a PID-eket úgy is át kell majd állítani, szóval nem sokat veszítünk. A Transmitter Setup Wizardot azonban nem kell lefuttatni! Ha kész a wizard, akkor a következőket érdemes leellenőrizni:
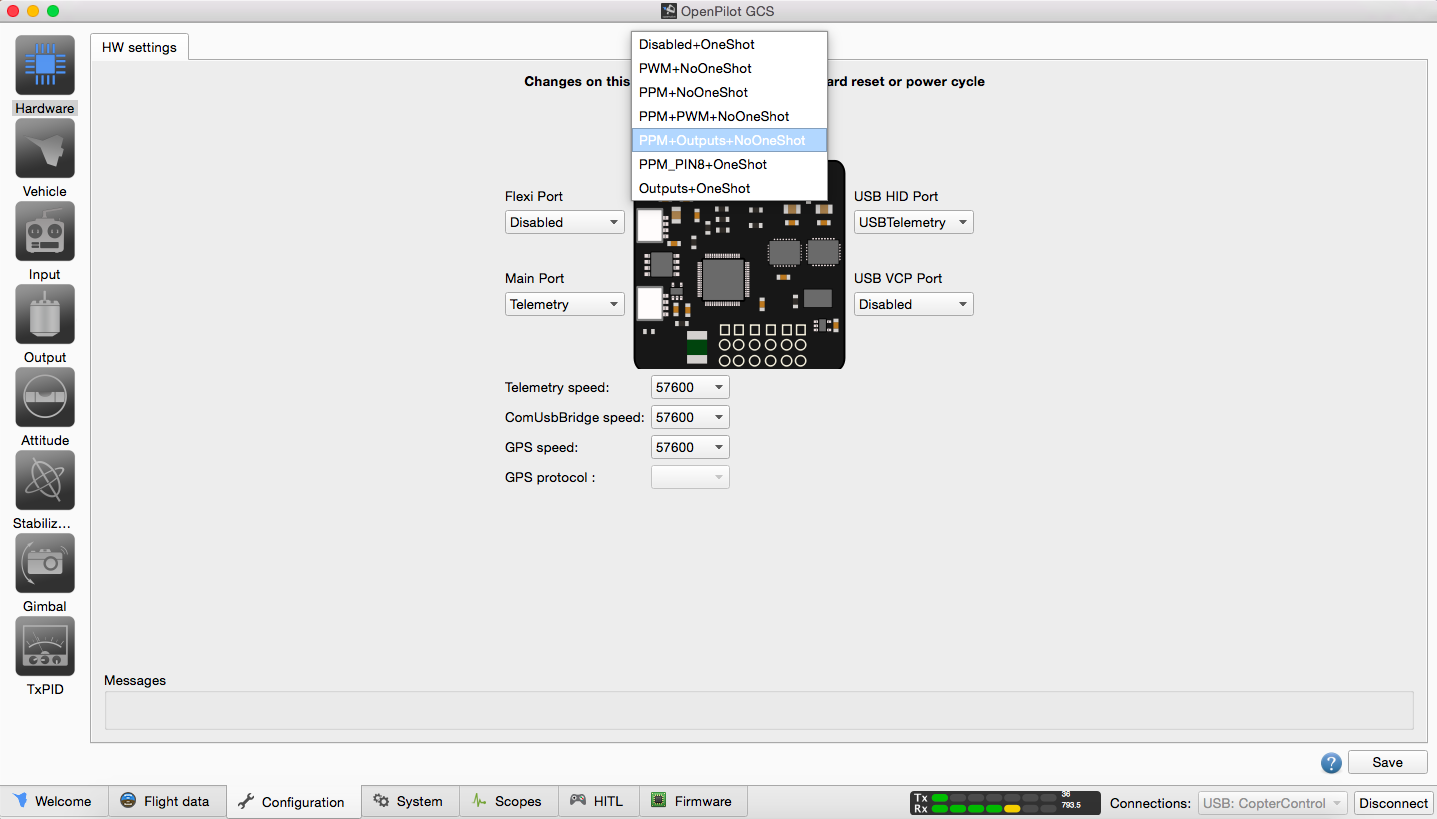
1. A hardware fülön a csatlakoztaás módja PPM_PIN8+OneShot, vagy Outputs+OneShot (én használok Aux Outputot, tehát nálam az utóbbi).
2. Az Output fülön a Bank 1 és Bank 2 esetében mindenhol OneShot125-nek kell lenni a kapcsolódási módnak.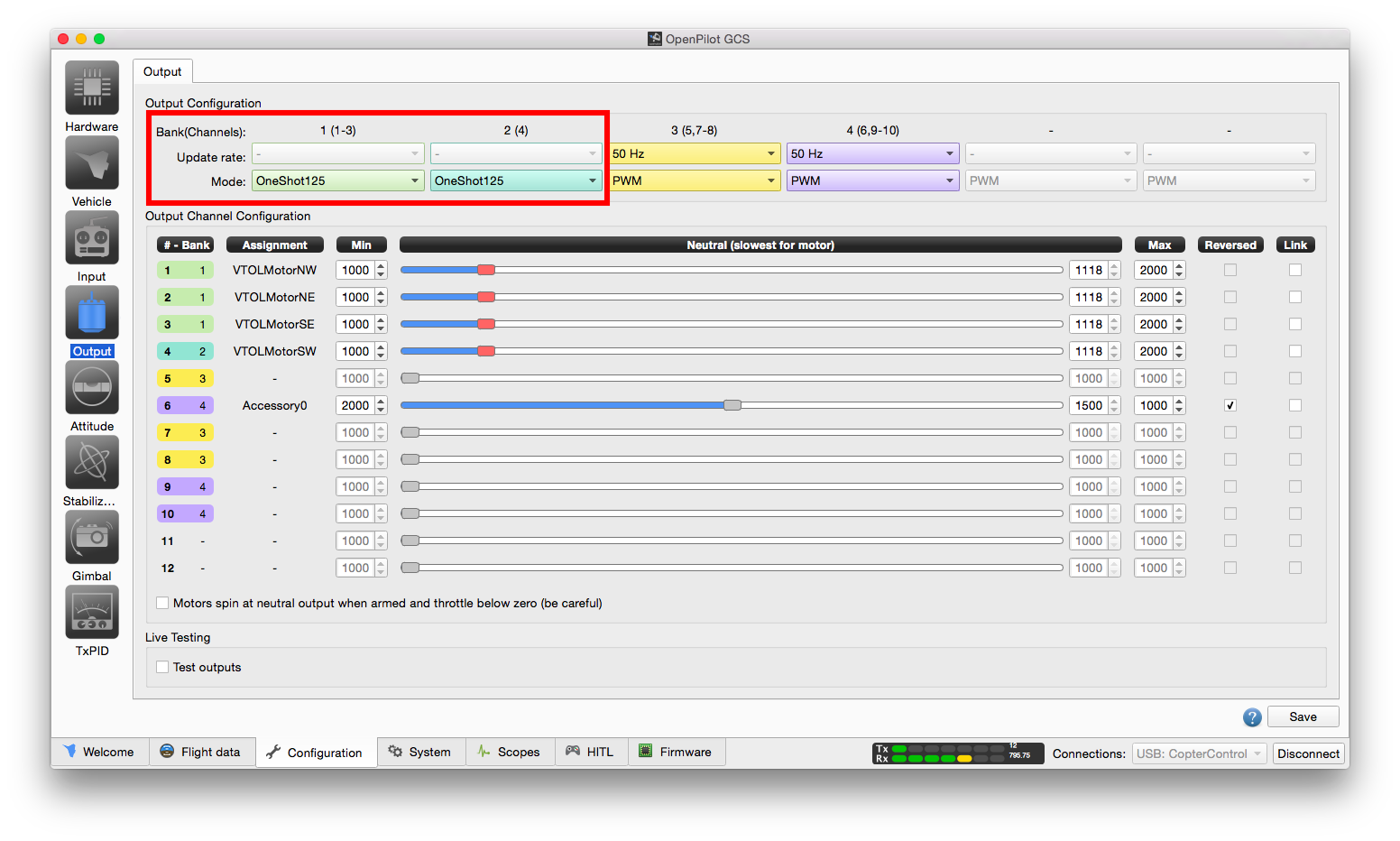
3. A Hardware Setup Wizarddal elvileg már újra kalibráltuk az ESC-ket, esetleg az Output fülön ezt is érdemes még egyszer ellenőrizni a motor pozíciókkal és forgásirányokkal együtt.
4. Végezetül, ha használtunk Accessory Output-ot, akkor azt újra be kell állítani, mind a Hardware fülön a hozzárendelést, mind pedig az Output fülön a kalibrációt.
Ennyi volt, most már csak reménykedni kell, hogy az ESC-k bírják az aktív fékezésből származó többletterhelést és indulhat újra a PID tunning és a repkedés.