
Az egyik oka, hogy végül a CC3D mellett döntöttem, hogy már akkor hallottam, hogy a gyári OpenPilot szoftver mellett lehet rajta futtatni akár a Multirotor közösség új üdvöskéjét a Dominic Clifton által a BaseFlightból átalakított CleanFlight szoftvert. Már korábban írtam róla itt és itt, hogy a két vezérlő nagyon hasonló, mindkettő az STM32 processzort használja.
Ebben a bejegyzésben magáról a telepítésről, illetve az első tapasztalatokról fogok írni. A CleanFlightról és az azzal szerzett tapasztalatokról későbbi bejegyzésekben foglalkozom majd.
CleanFlight telepítése CC3D-re.
A telepítés rendkívül egyszerű. Mielőtt nekiállnánk, a következőkre lesz szükségünk.
- Ha valaki olyan elvetemült, hogy a CC3D-t kibontás után egyből CleanFlightal flasheli, akkor is szükség van az OpenPilot GCS szoftverre, valmaint a csatlakoztatáshoz a MicroUSB kábelre.
- A CleanFlight lehetőleg legfrissebb stabil verziójára, ami itt érhető el. Figyeljünk rá, hogy a CC3D-hez való változatot töltsük le! Két file van, egy .hex és egy .bin. A .bin-re lesz most szükségünk, aminek a neve: "cleanflight_CC3D.bin"
- A CleanFlight configurátorra, ami egy Google Chrome alkalmazás, tehát, ha nem lenne a gépünkünk Chrome, akkor előbb azt, majd pedig a CleanFlight Configuratort telepítsük.
!!!Mindenképpen javasolt, hogy a flashelés előtt készítsünk egy mentést a CC3D beállításainkról, hátha vissza akarunk állni egyszer!!!
A folyamat viszonylag egyszerű, a lényeg, hogy a GCS segítségével a CC3D-t bootloader mode-ba kell kapcsolni, majd ott kiválasztani a gépünkre letöltött cleanflight.bin filet és már tölthetjük is fel rá. Az alábbi YouTube video elég jól szemlélteti ezt.
Első lépés tehát a GCS-en belül a Rescue gomb megnyomása (mielőtt a CC3D-t a számítógéphez csatlakoztatnák), majd ezt követően 20 másodpercen belül a CC3D USB-n keresztüli csatlakoztatása. Ha ez megvan, akkor a következő képernyőt kapjuk.
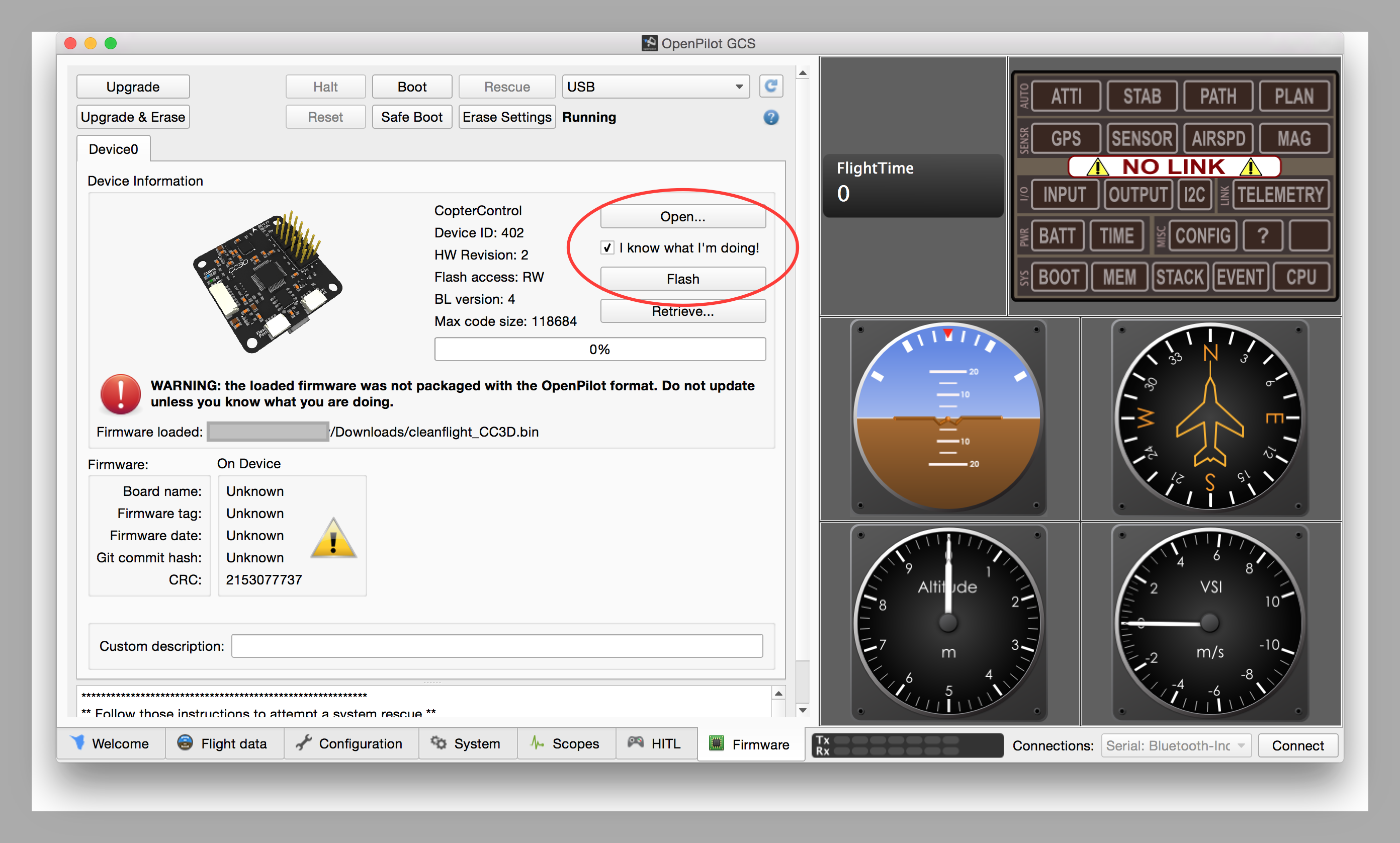
Itt az Open… gombra kattintva kiválaszthatjuk a letöltött firmware filet, majd beklikkeljük az “I know, what I’m doing!” pipát, ezzel jelezve, hogy nem vagyunk (teljesen) retardáltak. Végezetül klikk a Flash gombra. Amint a folyamat végére ért, már kihúzhatjuk az USB-t és kiléphetünk a GCS-ből.
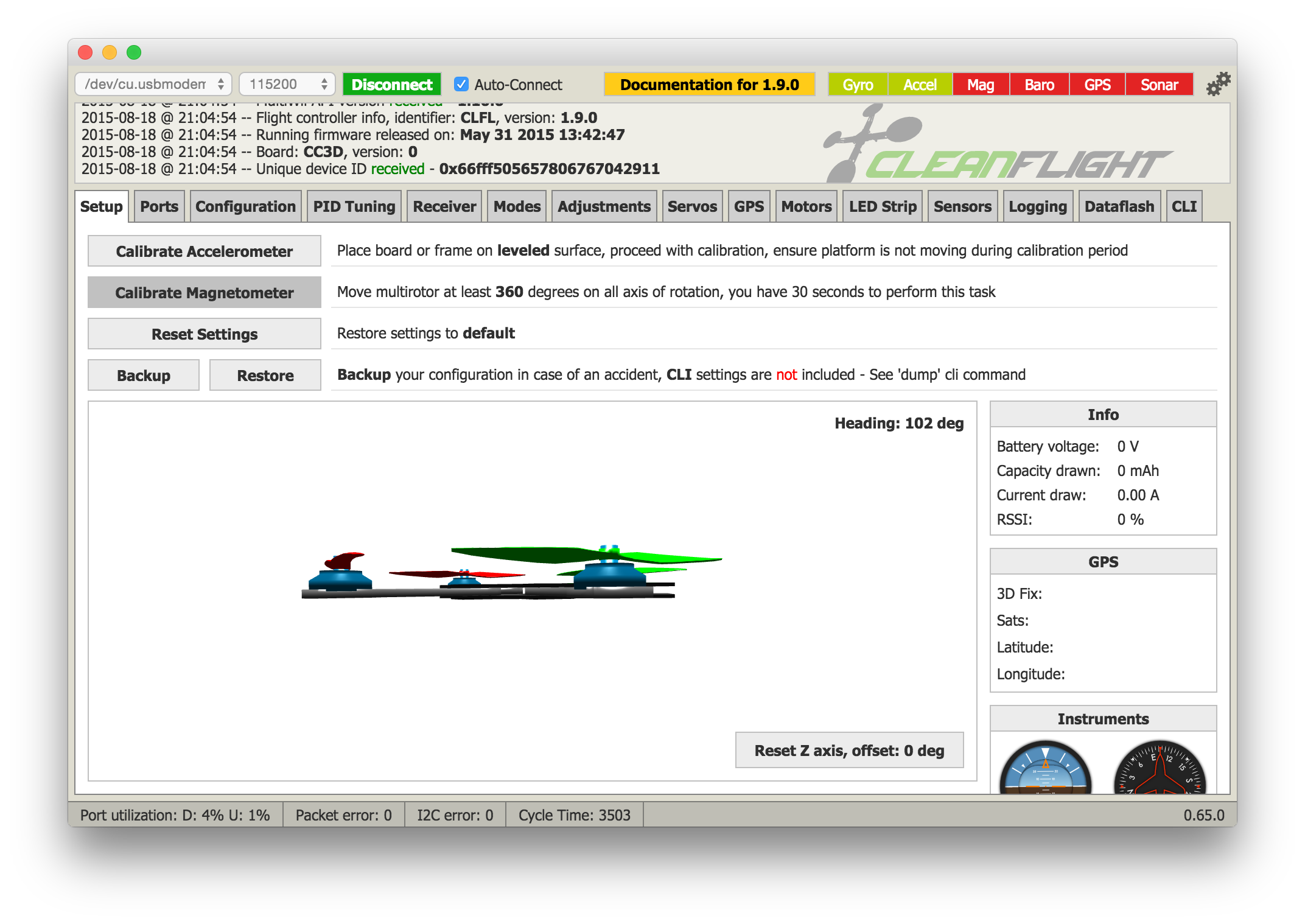
A CleanFlight Configuratort elindítva és az USB-t bedugva már fel is jön a frissen telepített vezérlő, nekiállhatunk a beállításoknak.
 A következő fontos teendők
A következő fontos teendők
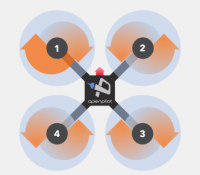
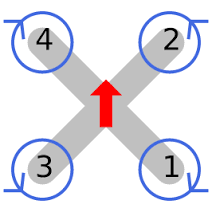
FIGYELEM!!!! A CleanFlight más motorkisztást használ, mint az OpenPilot (egy beteg, távolkeleti logika alapján, ha engem kérdeztek). Azaz, át kell dugdosni az ESC szervócsatlakozókat, különben nem nagyon fogunk tudni felszállni. Legalább a forgásirányok megegyeznek, így a motorcsatikat nem kell átdugdosni, vagy forrasztani.
|
CC3D OpenPilot motorkiosztás |
CleanFlight motorkiosztás |
A következő lépés a rádió vevő (Receiver, Rx) bekötésének rendezése. Ha PWM módot használtunk (minden csatornát egyenként kötöttünk az RC bemenetekre), akkor valószínűleg bajban vagyunk, mert ez a CleanFlight-CC3D verzióban nem igazán támogatott. Ha PPM módont használtunk, mindezt sima No-OneShot módban, akkor a jelvezetékünk elvileg a 3-as PIN-en van, ilyenkor jók vagyunk. Ha viszont a PPM rendszert OneShot125 módban használtuk, akkor a 8-as PIN-en van a szignál, amit most vissza kell tenni a 3-as PIN-re.
Ha ezekkel megvagyunk, akkor kezdhetjük a setupolást.
Szembetűnő különbségek
Először is, egyből látszik, hogy a CleanFlightot elsősorban nem CC3D-re írták. Olyan alapvető problémába ütközünk rögtön az elején, hogy a “Save and Reboot” gomb megnyomása után a vezérlő újrabootol ugyan, de nem csatlakozik a konfigurátorhoz. Ez egy ismert probléma és csak úgy lehet megoldani, ha előbb megtápláljuk a CC3D-t és amikor már bebootolt, csak akkor csatlakoztatjuk az USB-t. Erre két módszer van. Az első, hogy a LiPo-val élesztjük fel a CC3D-t. Ez elég macerás. A második, hogy az USB csatit a számítógép portjába nagyon lassan dugjuk be, amint a CC3D-n felvillannak a LED-ek, álljunk meg és várjuk meg, amíg bebootol (a kék LED elkezd szaporán villogni). Ezután már benyomhatjuk tövig az USB-t és a CleanFlight egyből csatlakozni fog.
A másik dolog, hogy több funkció nem működik CC3D-n. Például, míg a Naze32 rendelkezik a fő akksi feszültségének mérésére szolgáló bemenettel, CC3D esetében jelenleg ezt csak forrasztással (sőt, a chip miniatűr lábaira való forrsztással) lehet meogldani. Ugyanúgy nem megoldott a csipogó meghajtása. A Naze32 egy más filozófiát használ a csipogásra. Ettől függetlenül elvileg még kéne tudni CC3D-nél bevállt, szervó csatlakozáson keresztüli megoldást, de én eddig nem tudtam életre lehelni.
A közkedvelt, vezérelhető LED funkciót viszont tudja.
Váltás Pro-Kontra
A CleanFlight, ahogy korábban is írtam, - a BaseFlighthoz hasonlóan – egy “haladó” szoftvert. Kb. Olyan érzés átállni OpenPilotról, mint Windows 10-ről Linuxra váltani. Nincsen semmiféle setup varázsló, mindent kézzel kell beállítani és nem egy dolog van, amit CLI-ba begépelt parancsokkal. Elsőre még nekem is kemény volt, pedig már egy ideje foglalkozom a témával.
Ha valaki teljesen kezdő, véleményem szerint tökéletesen jól jár a CC3D-OpenPilot comboval. Csak akkor állj neki a CleanFlightnak, ha nagyon eltökélt, de legalább is van kéznél egy szakértő haver, aki segít, különben tuti hajtépés lesz belőle.
Hogy mégis miért váltsunk? Hát azért, mert a hardcore miniquadosok többsége (80-90%) CleanFlightot használ. A fejlesztő közösség iszonyatosan aktív és nagyon keményen dolgozik, hogy a szoftvert még profibbá tegye a quadok számára. 2015 Január óta 9!!! új verzió jött ki belőle, míg az OpenPilotból szintén 7, de abból az utolsó három a CC3D-t nem is támogatja (tehát csak 4). És ott lehet még az Autotune, amiről vegyeseket hallottam és persze a villogó, színváltó LED vezérlés :). Nem kérdés tehát, hogy ha valaki komolyan gondolja a miniquad-FPV Race dolgot, akkor CleanFlight, de akkor fel kell kötni a gatyáját, mert ez nem a gyengeszívűeknek való. Ja? És minimum középszintű angoltudás kell hozzá, mert a segítség nagy része bizony azon a nyelven van.
Játékhoz, szórakozáshoz, tanuláshoz, kísérletezéshez én inkább az OpenPilotot javaslom mindenkinek.


