
MW OSD konfiugrálás
Ha az első lépéssel végeztünk és fent van az MWOSD firmware a MinimOSD modulonkon, akkor jöhet a konfiguráció.
Magát az OSD modult ugyanúgy az FTDI adapteren keresztül kell csatlakoztatnunk a számítógéphez, mint ahogy a firmware feltöltéséhez tettük.
Ezután meg kell nyitnunk az MW OSD GUI programot, amelyet ugyancsak a Scarab könyvtárban találunk: /scarab-osd-R1.5/MW_OSD_GUI/
Ez a grafikus felület szerintem nagyon jól áttekinthető. Egyedül a layout tervező részével nem vagyok kibékülve, de az is tanulható.
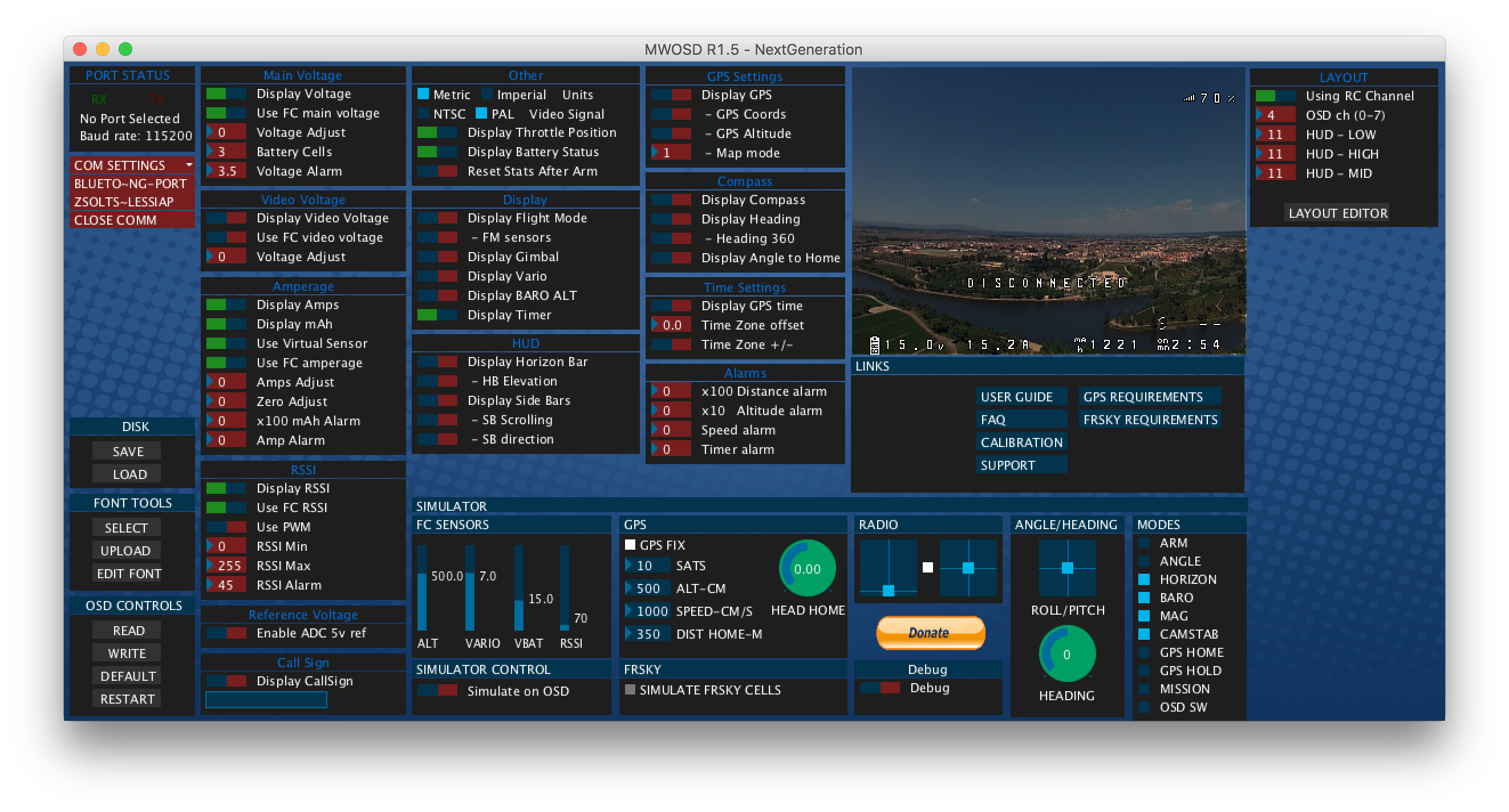
MW OSD GUI
A legelső lépés a karakterkészlet betöltése kell, hogy legyen, amit a bal alsó Font Tools menük segítségével intézhetünk. Először a Select gombbal kiválaszthatjuk a rendelkezésre állók közül, hogy melyik font-készletet szeretnénk használni. Aztán, ha akarjuk, ezt akár még szerkeszthetjük is. Majd az Upload gombbal mindezt feltöltjök a MinimOSD-re. Enélkül könnyen lehet, hogy nem fog megfelelően működni a kijelző, ezért ez egy fontos lépés.
A GUI-n egyenként be tudjuk állítani, hogy milyen értékeket akarunk megjeleníteni és azokat az értékeket az FC-ről soros porton keresztül fogadva, vagy pedig a lapkára szereld ADC (analóg-digitális konverter)-ken mérve szeretnénk előállítani.
Én lányegében minden értéket az FC-ről küldök. Innen jön az akkufeszültség, valamint az RSSI (ezt a Taranis-ról egy RC csatornán küldöm vissza a CleanFlight-ba), a gázkarállás-százalék érték, valmaint elméletileg a virtuális áramerősség-mérő érték is (ezt még nem sikerült igazán kalibrálni). Később egybéként az akksit direktbe is rá akarom kötni az OSD-re, mert így két független forrásom lesz a feszültségmérésre, így biztos nem lesz ebből gondom.
Ugyancsak itt lehet egyébként a MinimOSDvel mért érékek kalibrációját finomhangolni.
Jól jönnek még a riasztások is, amelyek az Armed/Disarmed mód kijelzést, az alacsony akku-feszültség kijelzést és alacsony RSSI jel riasztást is magukban foglalják.
Lehetőség van repülési-mód kijelzésre is, amit én nem használok. A többi, GPS-hez és tájolóhoz kapcsolódó dologra pedig eleve nincs szökség 250-es quadnál.
A mesterséges horizont sem az igazi szerintm, mert ezeknek a gépeknek a nagyon gyors sebességéhez képest elég lassan reagál, így inkább zavar, mint segít.
A layout szerkesztőben a megjelentíteni kívánt mezőket elrendezhetjük és több layoutot is szerkeszthetünk. Definiálni kell az elsődleges és a másodlagos layoutot, amelyek között válthatunk. Én erre a távvezérlő egyik kapcsolóját használom, ezért a "Using RC Channel" opciót választottam.
MinimOSD Micro csatlakoztatás
Ha a konfigurálással végeztünk, a következő lépés a MinimOSD bekötése a videó-rendszerbe és csatlakoztatsá az FC-hez (esetemben ugye a Naze32-höz).
Én ezt így oldottam meg.
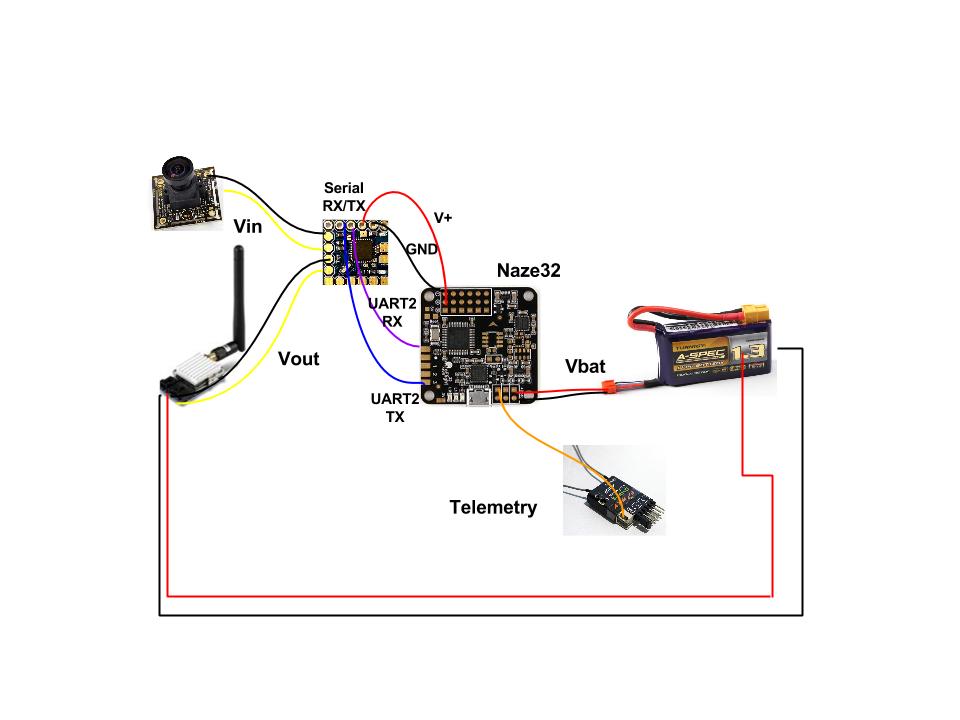
MinmoOSD Micro csatlakoztatása Naze32-höz UART2 soros porton keresztül
CleanFlight beállítások
Innen már csak egy feladat van, a CleanFlight-ban a megfelelő soros port konfigurációt hozzáadni. Itt azért el kell mondanom, hogy a MinimOSD csatlakoztatásához egy soros port kell. Ez lehet a két meglévő hardveres soros port egyike (UART1, UART2), vagy valamelyik SoftSerial port is. A port kiválasztásánál a következőkre kell figyelemmel lenni:
- Az UART1 osztozik az USB porttal és a Telemetria porttal. Egyszerre csak egy működhet (tehát pl. ha az USB-t csatlakoztatjuk, le kell venni a MinimOSD-t).
- UART2 az RC tüskéken érhető el, csak akkor ha az RC Vevőt PPM (vagy S.Bus) protokollon csatlakoztatjuk.
- A SoftSerial portok szintén csak PPM estén érhetők el, szintén az RC input tüskéken és nem tudják azt a teljes sebességet, amit a hardver portok, tehát lejjebb kell venni a CleanFlightban is és ez esetben a MinimOSD konfigurációját is változtatni kell a firmware-ben (az előző cikkben leírt Arduino IDE programozás config.h részének változtatásával)
Én a fenti ábra szerint a hardveres UART2 portra kötöttem a MinimOSD. A CleanFlightban erre a portra az MSP protokollt kell engedélyezni és mehet a teljes sebesség 115200 baud-on. Ez így néz ki:

És a legjobb a végére...
A MinimOSD már korábban leírt sok funkciója mellett a talán leghasznosabb, hogy engedi a PID paraméterek távirányítón keresztüli állítását. Aki valaha végzett már PID tuningot, az tudja, hogy ez mekkora könnyebbséget jelent.
A vezérlő Disarmed állapotában a gázt középen tartva és jobbra húzva (yaw-right), valamint a roll középállásában a pitch-et teljesen előre (fel) tolva belépünk a MinimOSD on-screen menüjében, amit vagy a szemüvegünkön, vagy a monitorunkon látuk. Innen a karok mozgatásával ki tudjuk választani a módosítani kívánt paramétert és beállíthatjuk az új kívánt értéket.
Ha nem is érzitek az igényt egy OSD beépítésére, ez a funkció szerintem már önmagában is megéri.
További hasznos blogok:
http://blog.oscarliang.net/minimosd-micro-setup-naze32-pid-rssi/





