Eljött a nagy nap, itt az összes fontosabb alkatrész, indulhat az összeszerelés.
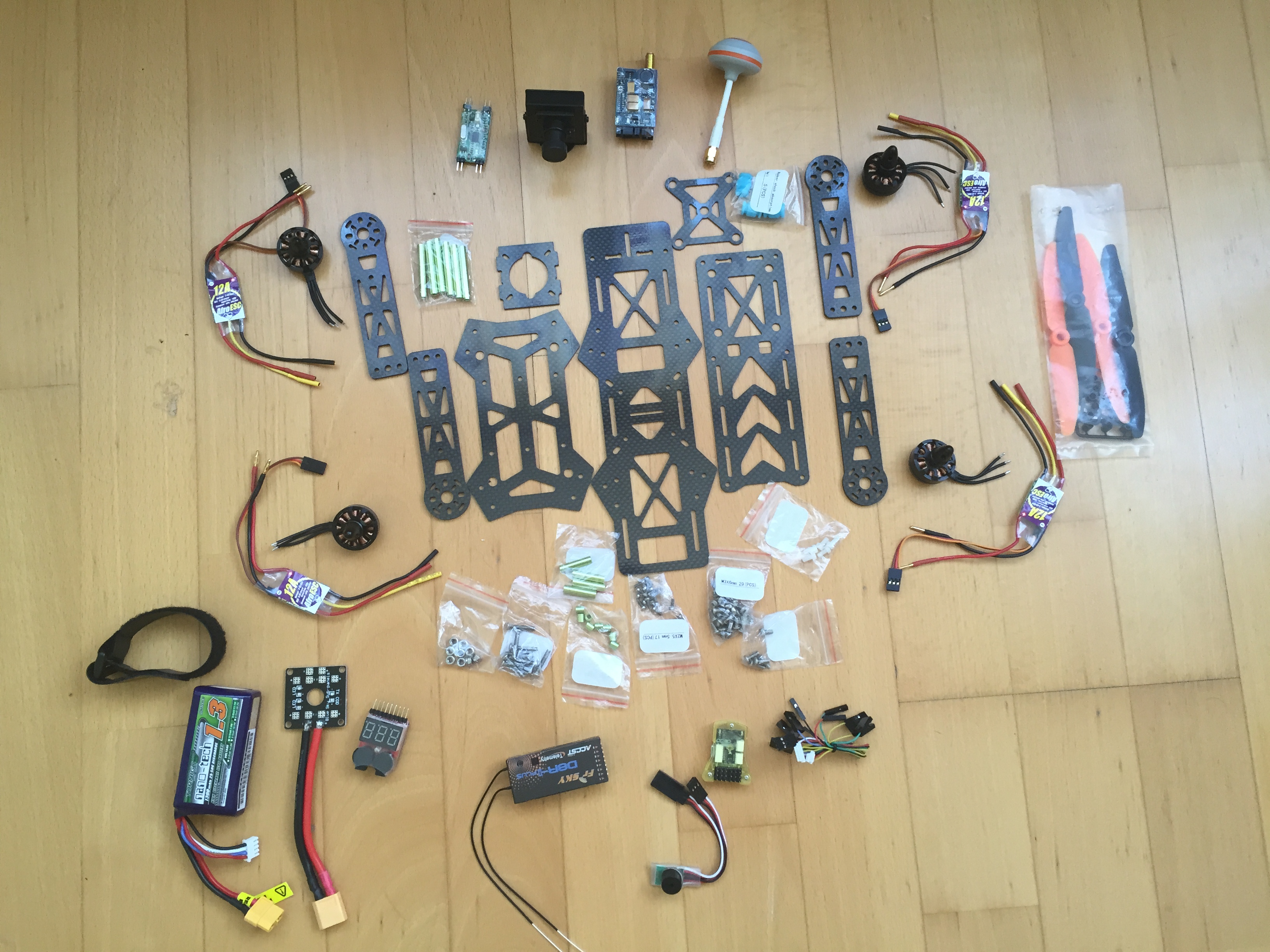
Ahogy a korábbi bejegyzésekből talán látszott, igyekeztem nagyon alapos előkészítőmunkát végezni, így elég jó elképzelésem volt, hogy miként is akarom összerakni a quadot. Természetesen, egy ilyen első építésnél elkerülhetetlen, hogy menet közben is szembesüljek pár dologgal, de ezeket igyekeztem rugalmasan kezelni.
Az építés előtt szükséges néhány "stratégiai" kérdést eldönteni. Ilyen volt például az ESC-k elhelyezése. Sokan az ESC-ket a karokra rögzítik. Én azonban szerettem volna védettebb (és aerodinamikailag is kedvezőbb) helyre, a gép aljára szerelni őket, és ezért is választottam a Nighthawk 250-es vázat, mert annál a "padlólemezen" van hely erre a célra (nagyon hasonlóan a Lumenier QAV250-hez).
Ugyancsak ilyen kérdés az áramelosztás megoldása. Elméletileg ezt egy kábelköteggel is meg lehet oldani, de okkal elegánsabb, tisztább és egyszerűbb megoldás az áramelosztó-lap (Power Distribution Board) alkalmazása. Erre a célra egy kicsit és könnyű, mini PDB-t választottam.
Ahogy egy ház építésénél, itt is az alapoktól kell indulni. Először tehát a váz alaplemezét fogtam, rászereltem egy kart és kimértem, hogy miként fog elférni a PDB és az ESC-k.
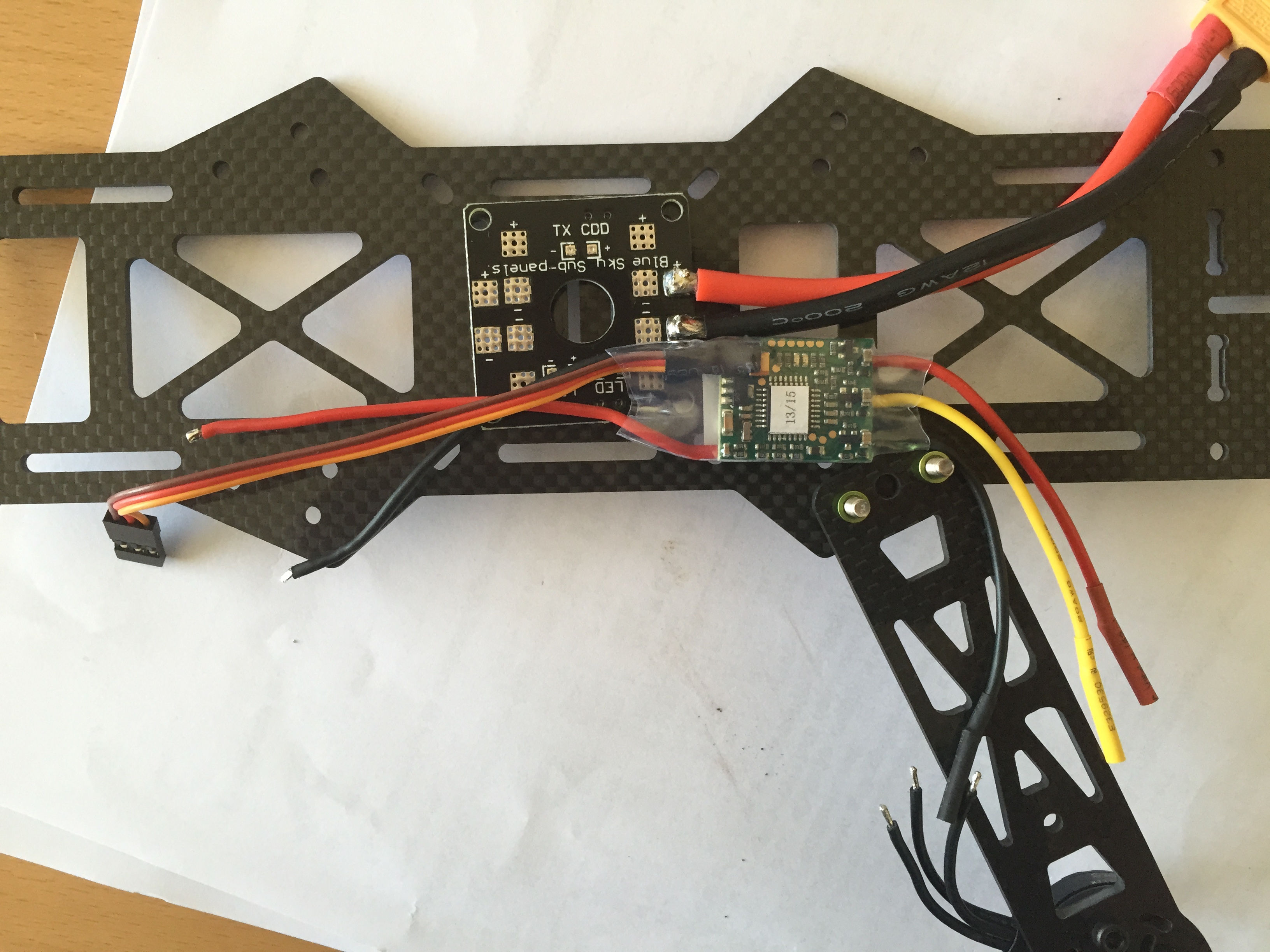
A PDB-re még korábban ráforrasztottam az XT60-as csatlakozóval ellátott fő betáp-vezetéket.
Miután megbizonyosodtam róla, hogy ezek így el fognak férni, felszereltem mind a 4 kart és a távtartókat a váz alaplemezére.

Eredetileg gondolkoztam, hogy a PDB-t nylon távtartókkal rögzítem, de kiderült, hogy ehhez nincs elég hely a alaplemez és a padlólemez között, így a kétoldalas ragasztó mellett döntöttem.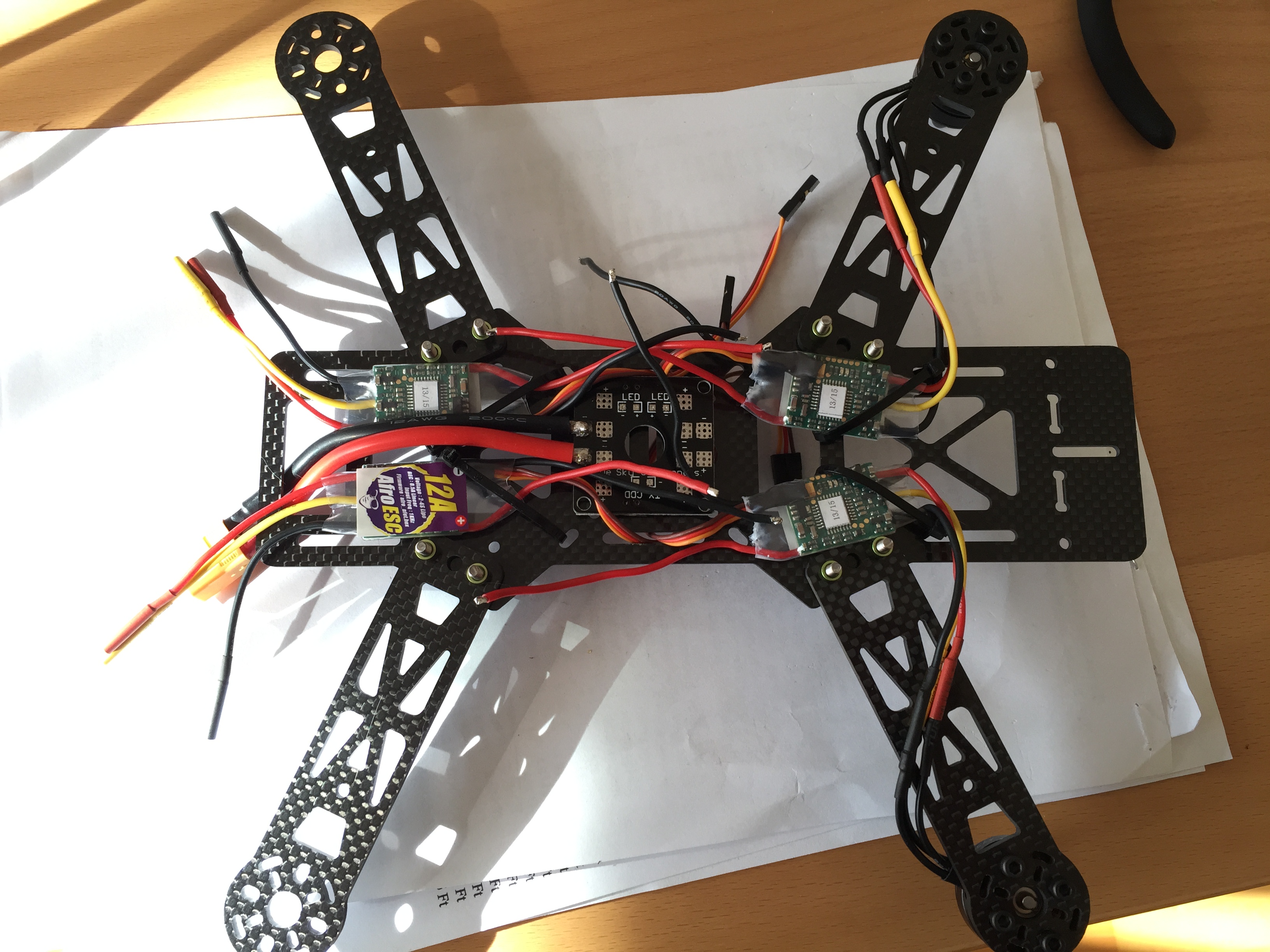
Itt már helyén a PDB és helyükre igazítva az ESC-k. Ezután megfelelő hosszra levágtam az ESC bemeneti kábeleket és beforrasztottam őket a PDB megfelelő csatlakozóira.
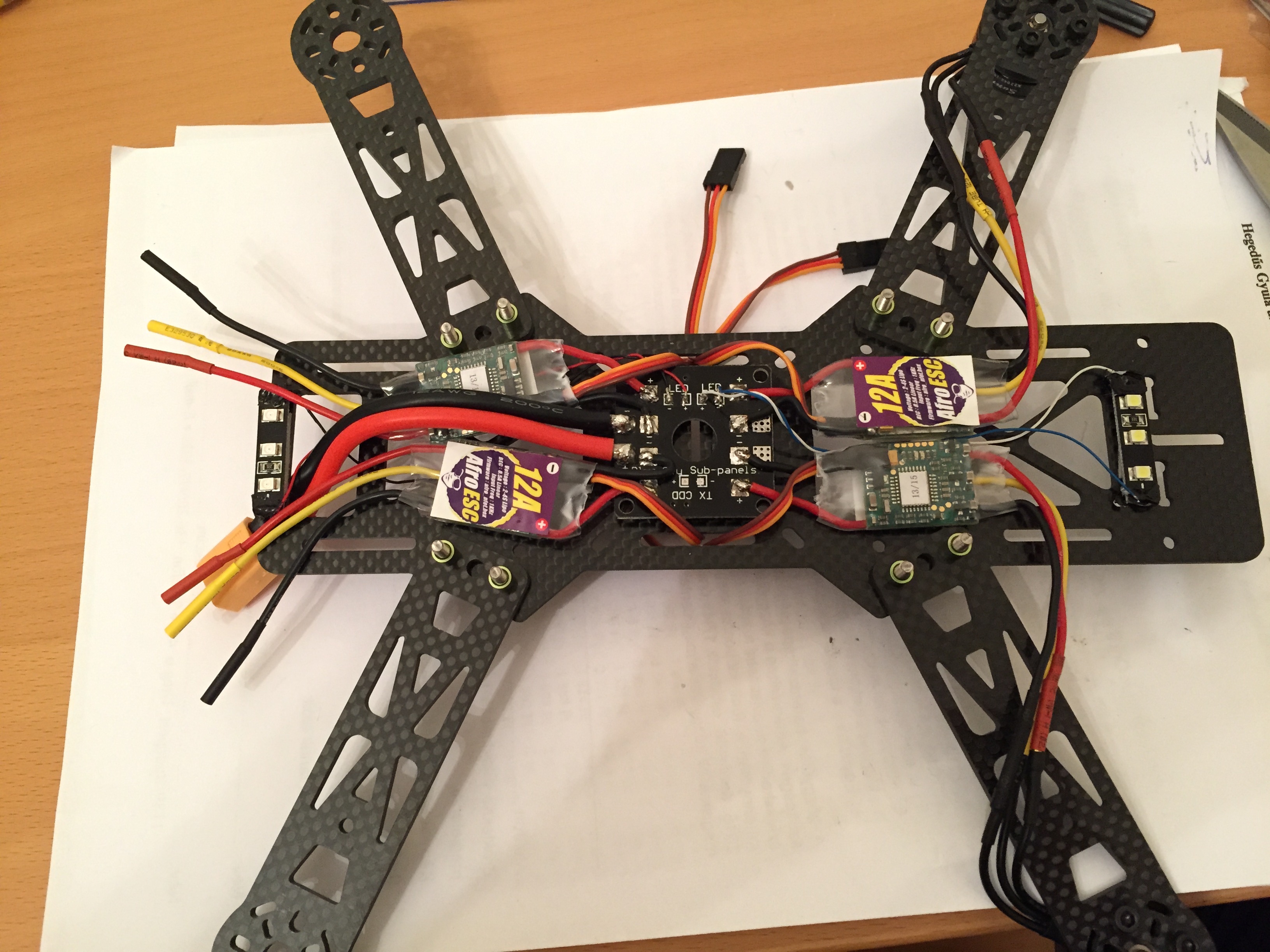
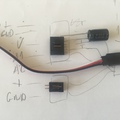
Az ESC vezérlő (szervó) kábeleit a váz nyílásain keresztül átvezettem. Itt az is látszik, hogy a gép elejére és hátuljára egy-egy LED sort is ragasztottam, amelyeket szintén közvetlenül a PDB-r kötöttem. Ez a PDB olyan, hogy van külön a LED-eknek dedikált kimenete, amit egy mikrokapcsolóval ki- és be lehet kapcsolni. Így, ha nem lesz rá szükségem, vagy nem akarom, hogy fogyasszon (bár ez elhanyagolható tétel), akkor ki is tudom kapcsolni. Itt még nem forrasztottam be két további kimenetet, az egyik az OSD-nek viszi majd az akksi feszültséget, a másik pedig egy BEC-lesz, amely fixen 12V-ra limitálja (és szűri) az FPV rendszer tápellátását.
Az ESC-ket is kétoldalas ragasztóval rögzítettem, majd ezek után felkerült a padlólemez a helyére, amelyet a vázhoz kapott önzáró anyákkal rögzítettem. Mivel carbon fiber vázat használok, amely elektromosan vezető, a PDB alját és a forrasztásokat egy darab duct tape-pel letakarva szigeteltem. (Itt még csúnya fehér, de később megfordítottam és akkor már a fekete oldala volt kifelé).
A következő "stratégiai" döntés a motorok ESC-hez történő csatlakoztatására vonatkozott. Itt sokan a direkt forrasztásra esküsznek, de a bullet connector-os (magyarul nem is tudom mi a neve ennek a csatlakozónak :) ) csatlakozás tisztább és könnyebben kezelhető, bár egyesek szerint plusz hibaforrás.
Mivel az Afro ESC eleve bullet connectorokkal érkezett, ezért én is emellett a megoldás mellett döntöttem. A motor oldalon a csatik rendben is voltak. Az ESC betáp oldaláról levágtam a dugókat és azokat használtam a motoroknál. Mivel azonban ott csak 2-2 dugó van és nekem 3-3 dugó kell motoronként, ezért kellett vennem 4 dugót, amit egy hazai hobby boltban sikerült megoldanom. Jött tehát a 2 mm-es bullett dugót felforrasztása a motorokra.
 |
 |
 |
A forrasztásokat zsugorcsővel szigeteltem.
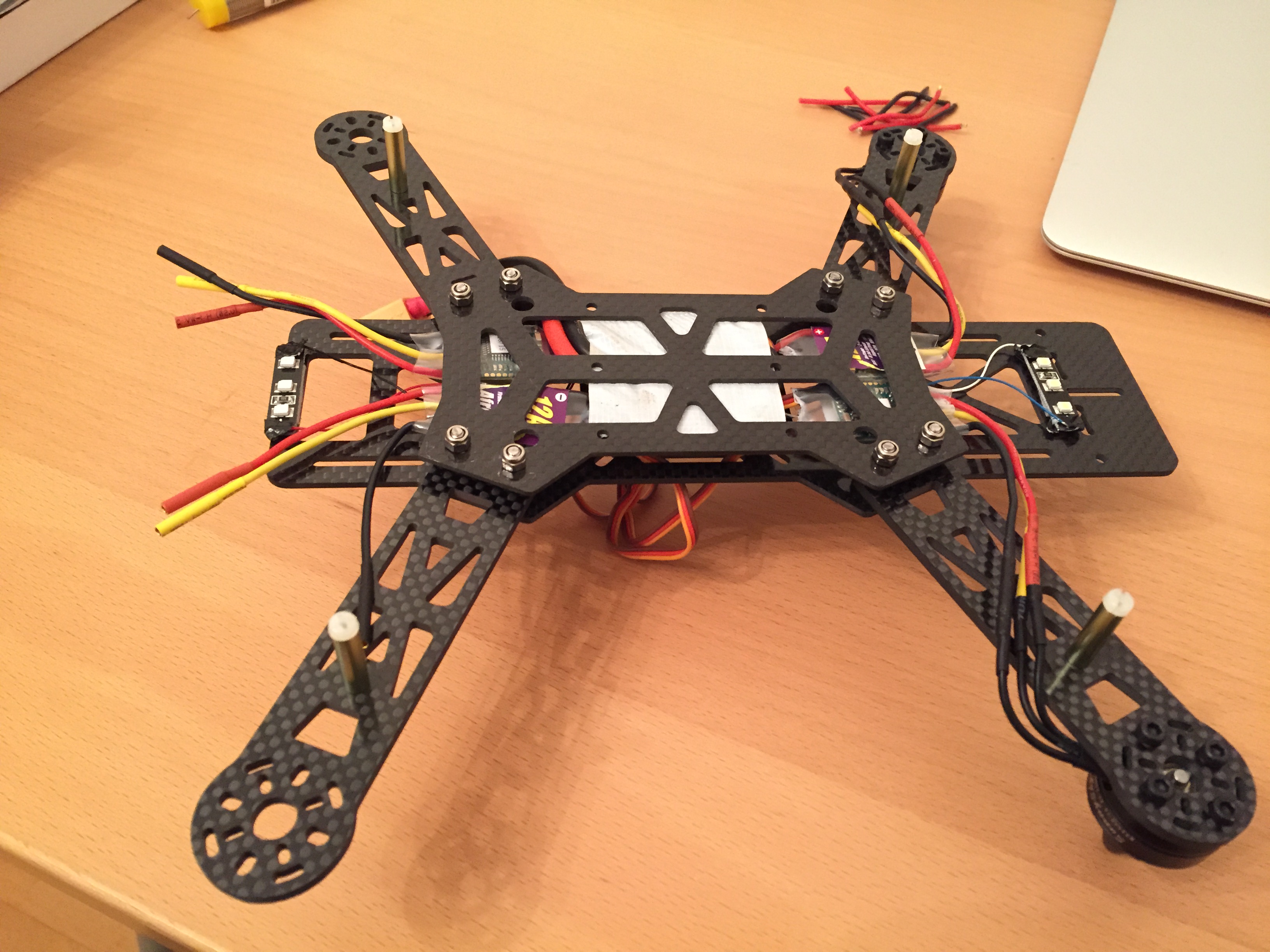
Nem maradt más hátra, mint a motorok felszerelése és a bullet connectorok csatlakoztatása. Itt még mindegy, hogy milyen sorrendben, mert később, majd a motor forgásirányok beállításához variálni kell velük.

Jó egy kicsit csaltam, mert itt már a repülésvezérlő is fel van szerelve, de erről majd a következő posztban.