A Naze32 Acro vezérlő gyárilag a BaseFlight vezérlőszoftverrel jön, amely a MultiWii vezérlőszoftver egy leágazása. A FPV multikopter versenygépek világban ma messze a legelterjedtebb szoftver a CleanFlight, amely a BaseFlight egy további leszármazottja.
Az új vezérlő beüzemelése ezért rögtön az új Firmware flashelésével kezdődi (nálam).
Mivel a kód alap nem túlzottan tér el, ráadásul szerintem a legtöbb CleanFlight Naze32-őn fut és fordítva is, ezért ez egy viszonylag egyszerű feladat.
Az első dolog, amire szükségünk lesz, az a CleanFlight Configurator, amit innen tölthető le. Ez egy Google Chrome alkalmazás, tehát ha véletlenül nem lenne Chrome a gépen, akkor előtte még azt is le kell tölteni.
A Naze32 egy Micro USB portal rendelkezik, tehát egy USB-MicroUSB kábelre szükség lesz. Az USB csatlakozáshoz továbbá kellhet Silabs VCP driver, ami innen tölthtő le. (Mac-re elvileg nem kéne, de nekem akkor ment csak, amikor telepítettem a legújabb verziót. Windoshoz mindenképpen külön kell telepíteni.)
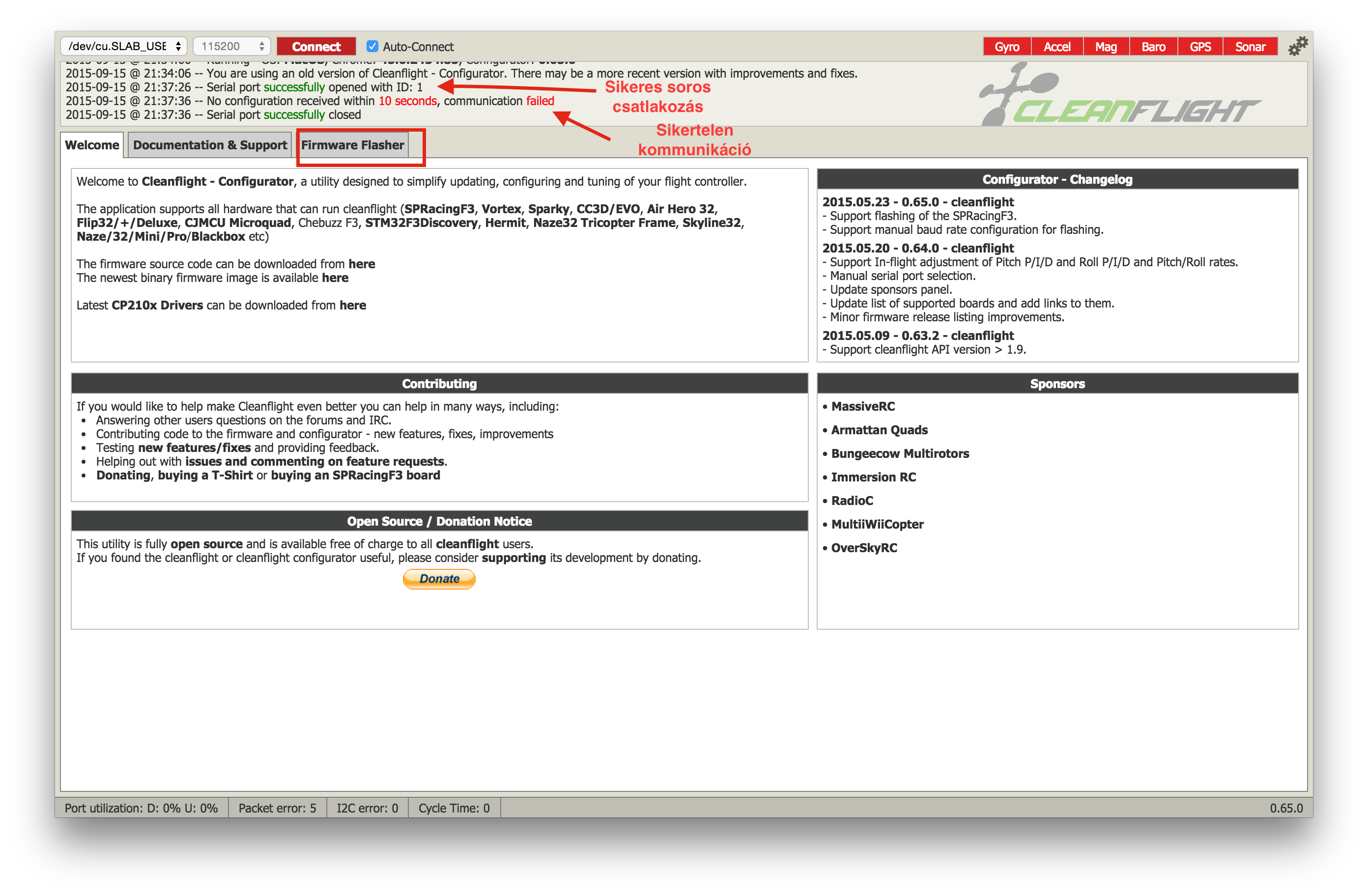
Indítsuk el a CleanFlight Configuratort, majd pedig csatlakoztatssuk az USB kábelen keresztül a vezérlőt. A konfigurátorban látni kellene, hogy van Serial kapcsolat, de a konfigurátor nem tud csatlakozni.
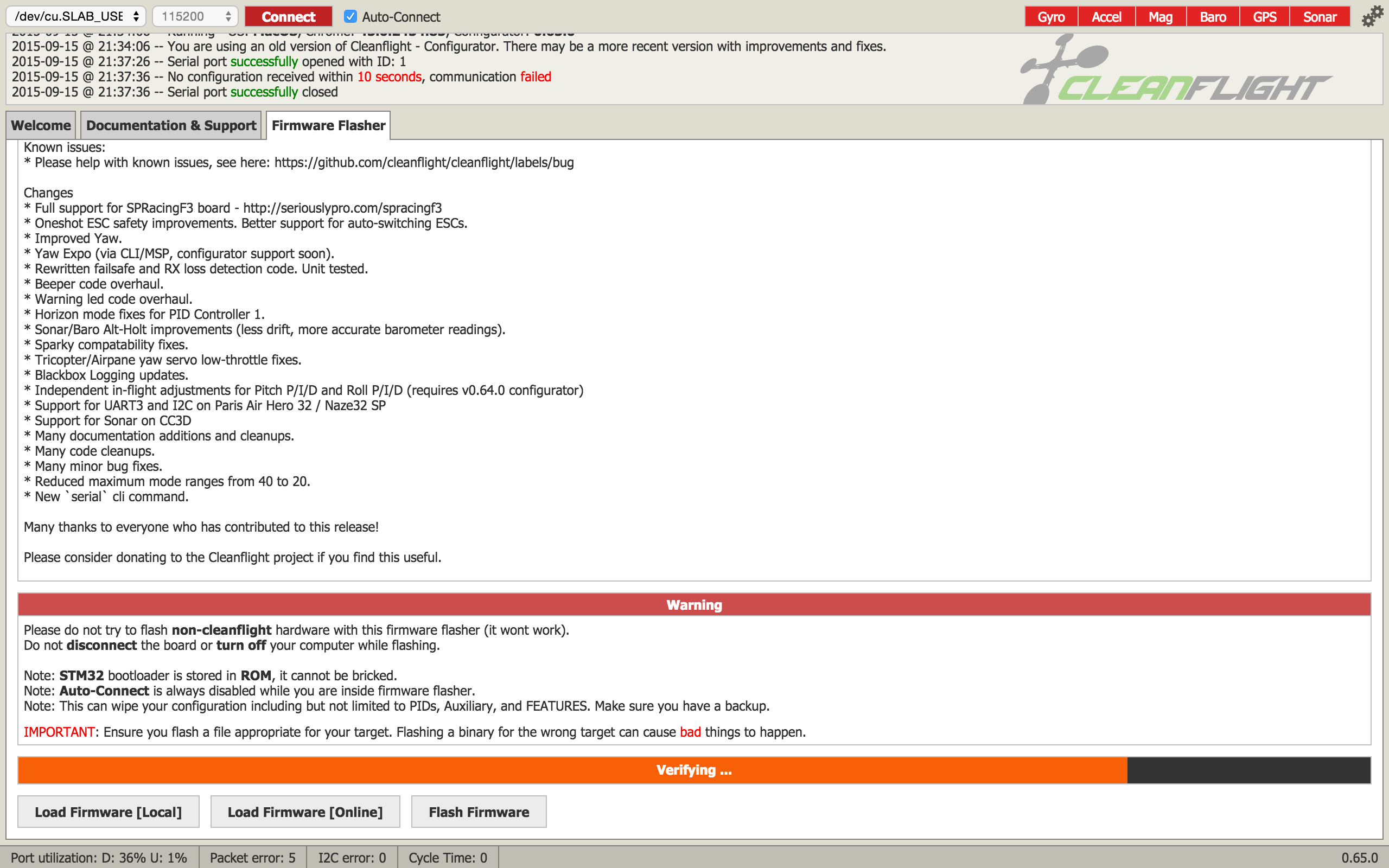
Kattintsunk a Firmware Flasher fülre.
 |
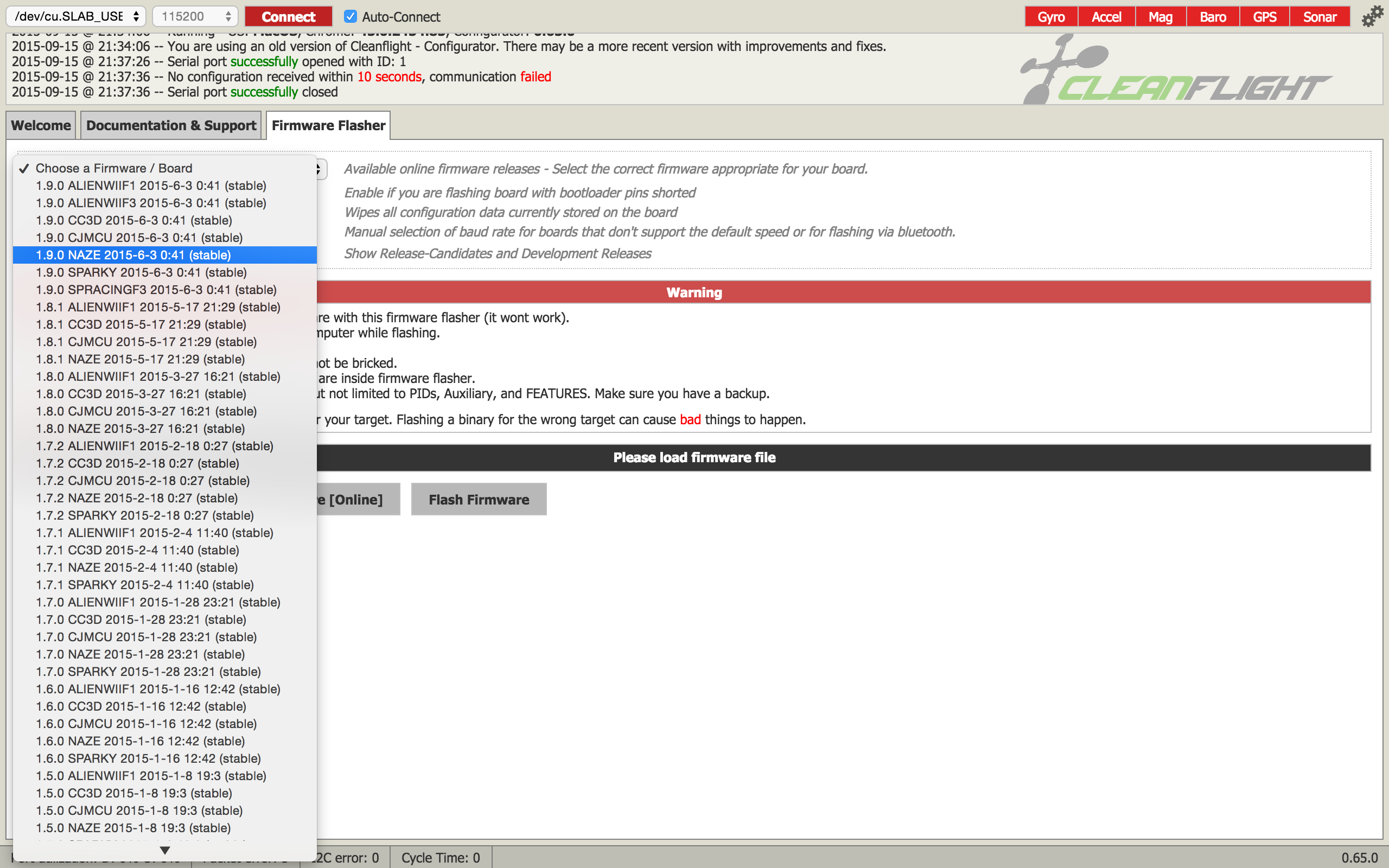 |
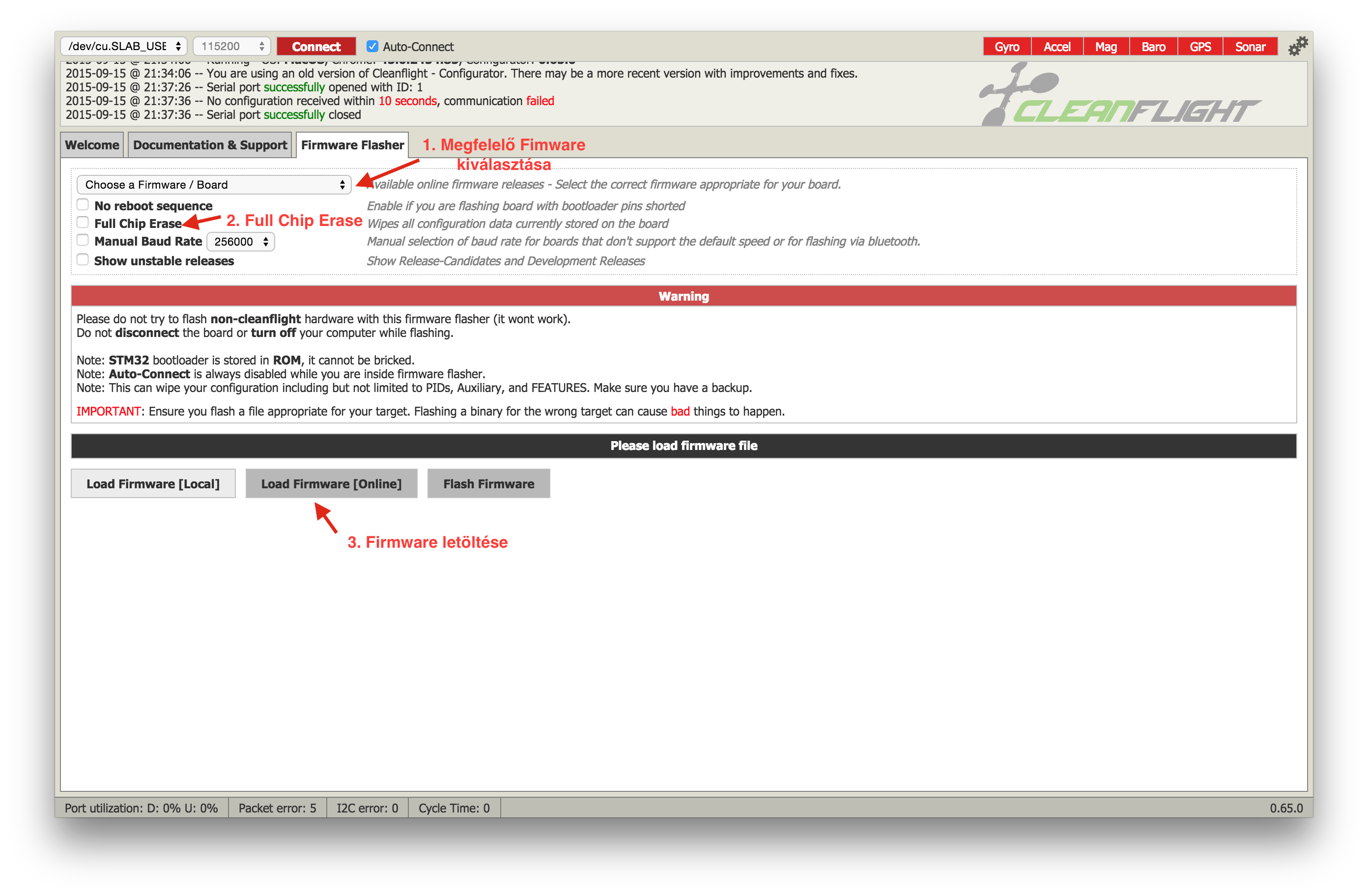
Itt a legördülő menüből válasszuk ki a vezérlő típusát és a kívánt firmwaret. Értelem szerűen Naze32 és javasolt a last stable release (legfrissebb stabil verzió), ami ma éppen az 1.9.0.
Az opciók közül elsőre érdemes a Full Chip Erase opciót beklikkelni, hogy egy igazán teljesen szűz telepítést kapjunk.
Ezután kattintsunk a Load Firmware (Online) gombra. Amint letöltődött a firmware és látjuk a release noteokat. Lejebb tekere katt a Flash Firmware gombra, majd tekerjünk megint fel és nézzük ahogy a piros csík végig ér és zöldre vált.
Ezután szerintem érdemes egyszer lehúzni az USB-ről a lapkát, majd visszatenni, hogy teljesen újrainduljon. Ezután a CleanFlight Configurator már csatlakozik is (ha nincs bekattintva az Auto-connect pipa, akkor rá kell nyomni a gombra) és indulhat a lap beállítása.
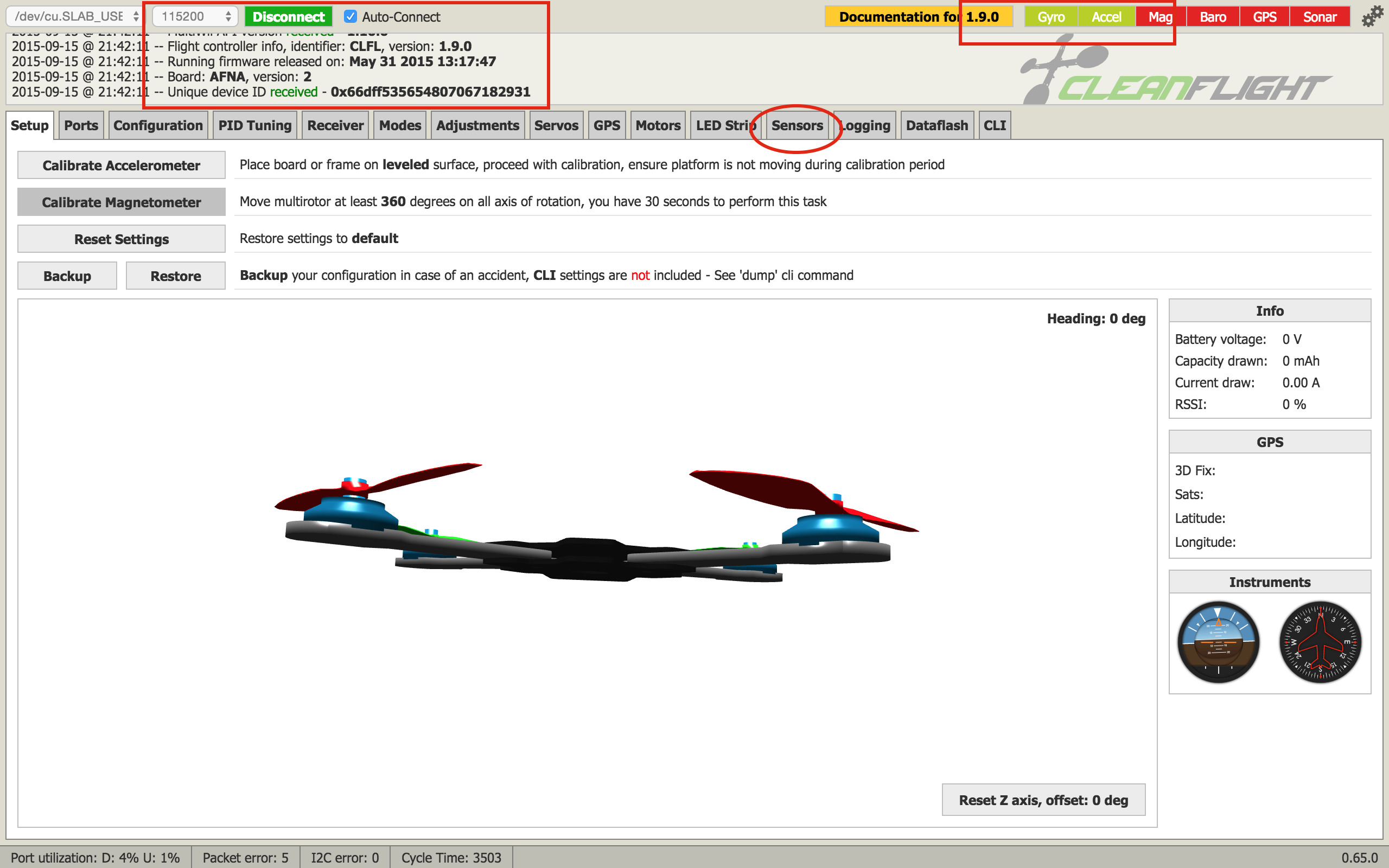
Első körben ellenőrizzük, hogy a szenzorok (Accelerometer és Gyro) működnek-e. Ezt egy részről balra fent látjuk, másrészről, ha mozgatjuk a vezérlőt, a képernyőn az animált quadkopter ugyanúgy mozog. (Esetleg a Sensors fülön egész részletesen is meg lehet nézni a szenzorok jeleit).
Ha minden zsír, akkor jöhetnek a grafikus felületen történő beállítások.
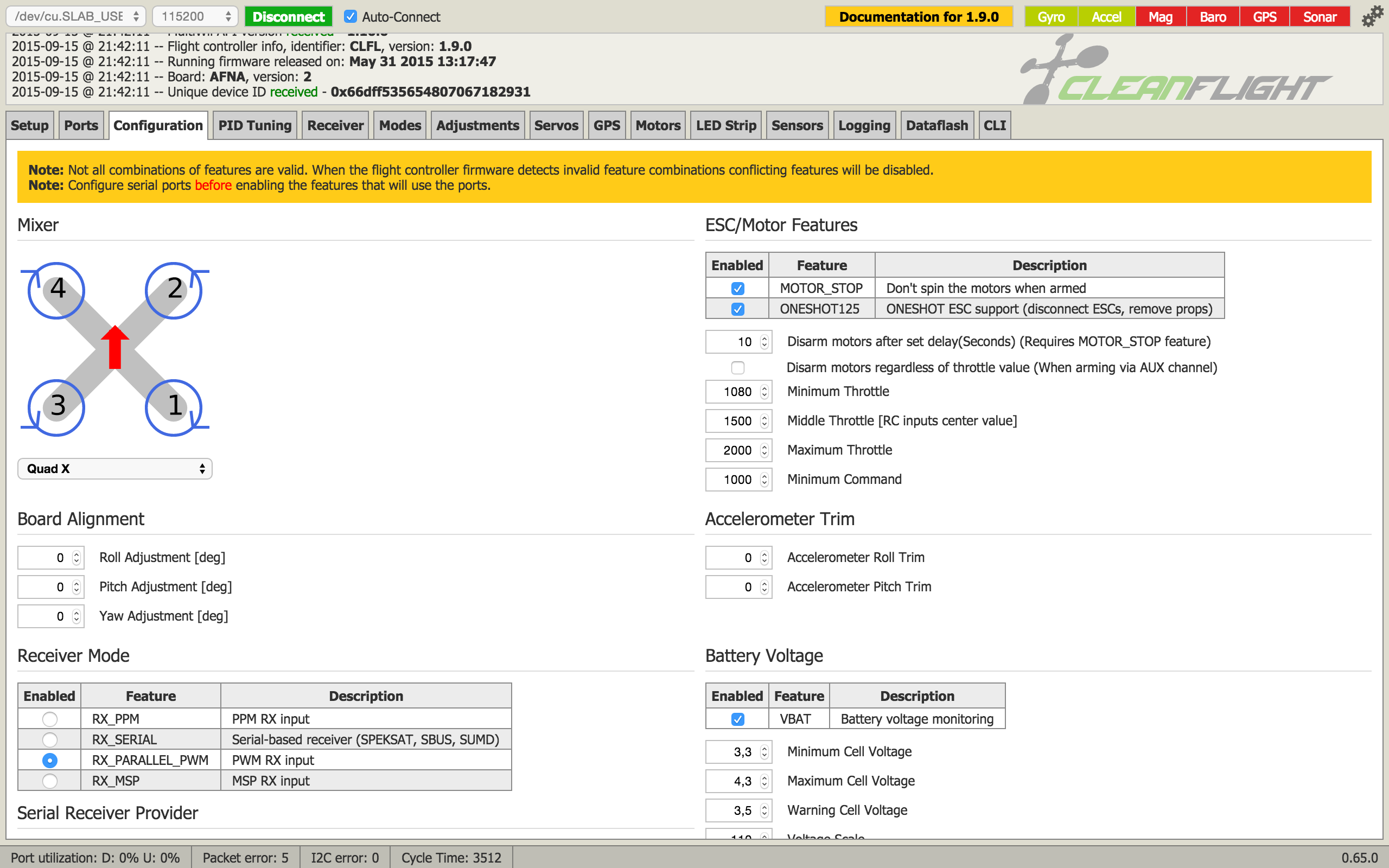
A Config fülön ellenőrizzük, hogy QuadX módusz van-e kiválasztva. Itt látjuk a motorok sorszámát és elvárt forgás irányát is, ami alapján ellenőrizni kell, hogy a motorjaink valóban így forognak. Ehhez a Motors fület és az ott található vezérlőket is segítségül lehet hívni.
Aztuán itt érdemes MOTOR_STOP funkciót bepipálni, hogy élesítés után ne induljanak el azonnal a motorok. Itt adhatjuk meg, ha szeretnénk ONESHOT125 protokolt használni az ESC-kkel való kommunkációra (segítek: akarunk, amennyiben az ESC ezt támogatja). Beállítható továbbá, hogy a motorok leállása után automatikusan disarmoljon (javasolt) és ezt mennyi idő után tegye.
Szitén itt érdemes megadni a minimum és maximum Throttle értékeket. Valahol 1000 és 2000 usec között, a középérték pedig legyen 1500. A minimum command általánban marad 1000.
Ezután be kell állítani a vevő csatlakozási módját. Remélem PWM-et már senki nem használ, a tipikus a PPM, ehhez válasszuk ki az RX_PPM funkciót. Ha valaki már olyan király, hogy valamilyen serial protokollt (S.BUS vagy Spektrum) haszhnál, azt is itt kell beállítani (ezeknél még van pár plusz trükk, amire itt most nem térek ki)
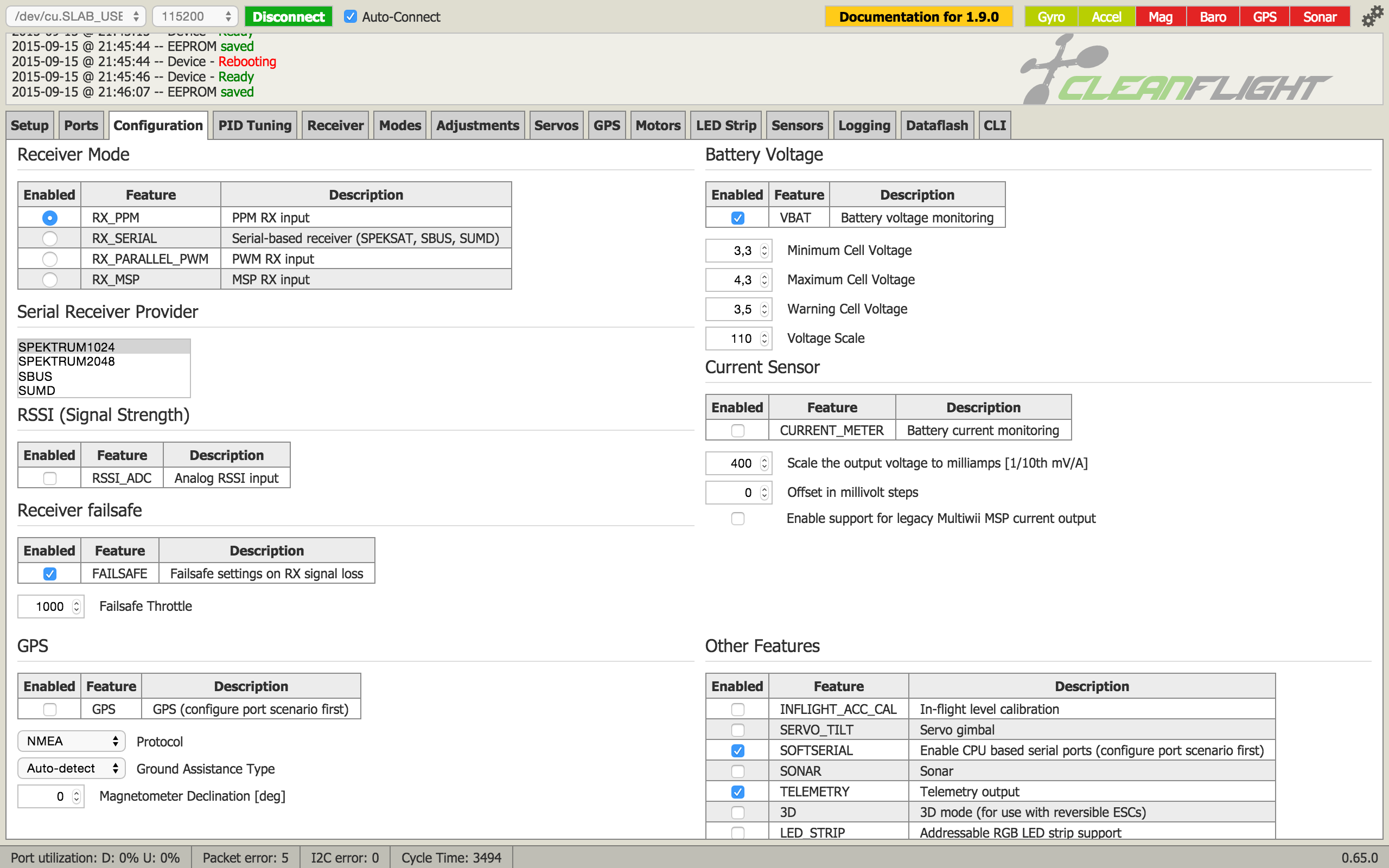
UPDATE: A legfontosabbat kihagytam. Feltétlenül pipáljuk be a Failsafe checkbox-ot. Ezzel, ha elveszti a gép a távirányító jelét, a gázt a Min_Command-ban megadott értékre leveszi, azaz leállítja a motort és a gép ott esik le, ahol van. Mindenki szerint ez a legbiztonságosabb megoldás, mert az alternatíva, hogy a kontrollok abban az állapotban maradnak, ahol voltak és a gép addig repül, míg neki nem megy valaminek, vagy rosszabb esetben valakinak.
Szintén itt engedélyezhetjük a VBAT funkció bekapcsolásával a vezérlő általi LiPo akksi feszültségmérést, valamint ennek a kalibrációját, ami nem az alapbeállítás részét képezi, ezért erről majd egy későbbi cikkben. Ugyanez a helyzet az áramerősség méréssel is, amelyet szintén itt lehet aktiválni, de erről megintcsak nem itt írok most.
Végezetül pedig az egyéb funkciók közül választhatunk. Ilyenek a vezérelhető LED csikok használata, a kameradöntéshez használt Servo funkció aktiválása, valamint az általam majd használt SOFTSERIAL és a TELEMETRY funkciók. A végén ne felejtsünk el a lap alján rákattintani a Save and Reboot gombra, amivel elmenthetjük a beállításokat.
A következő fül a portok beállítására szolgál. Itt főleg arra kell figyelni, hogy az UART1 mindig engedélyezve legyen és MSP-re legyen állítva, ugyanis ezen van az USB, amin keresztül konfiguráljuk a rendszert. Én még engedélyeztem az UART2 portot szintén MSP protokollon, mert ezen fogom a MimimOSD-t csatlakoztatni, valamint a Softserial1-et, ezen pedig Telemetria adatokat fogok az FrSky D4R-II vevőm és azon keresztül a Taranis távirányító felé küldeni.

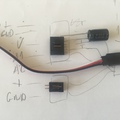
Jöhet a vevő (Receiver, Rx) beállítás. Ehhez persze csatlakoztatni kell a vevőt a vezérlőhöz. PPM módot használok, tehát 3 vezeték kell, Föld (Ground), 5V (Vcc) és PPM Jel. Ezek a Vevő oldali tüskék közül az 1-2-3-asra mennek ebben a sorrendben. Ha a csatlakoztatás megvan, akkor feszültséget kell adni a vevőre, például egy BEC-ről és amennyiben a távvezérlőn is be van kapcsolva (és persze össze van hangolva a vevővel), akkor a CleanFlight Configurator fülben látnunk kell a csatornákat. Ellenőrizzük, hogy minden a helyén van-e, illetve jó irányba mozdul-e el. Ha nem, akkor a csatornakiszotást állítani kell (nálam TAER1234). Tipikus probléma, ha csak egyetlen csatorna értéke ugrál össze-vissza. Ez azért van, mert a konfiguráció fülön nem jól állítottuk be (vagy nem mentettük el) az RX_PPM beállítást.
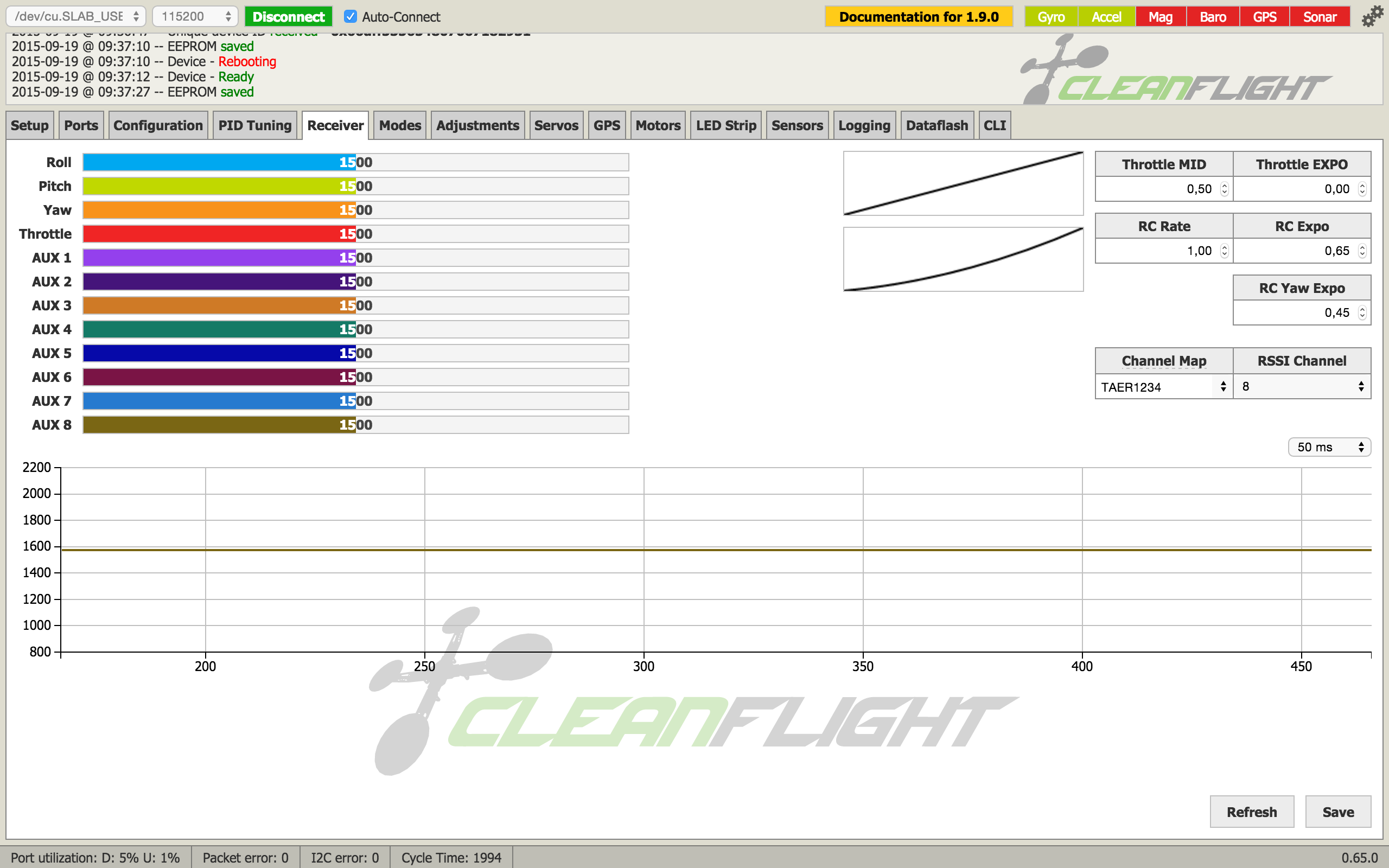
Szintén itt kell megadni, ha a távirányítónkat úgy állítottuk be, hogy az RSSI jelet belekeverje a PPM folyamba és ezt haszálni is szeretnénk. Ilyenkor meg kell adni az RSSI Channel-t.
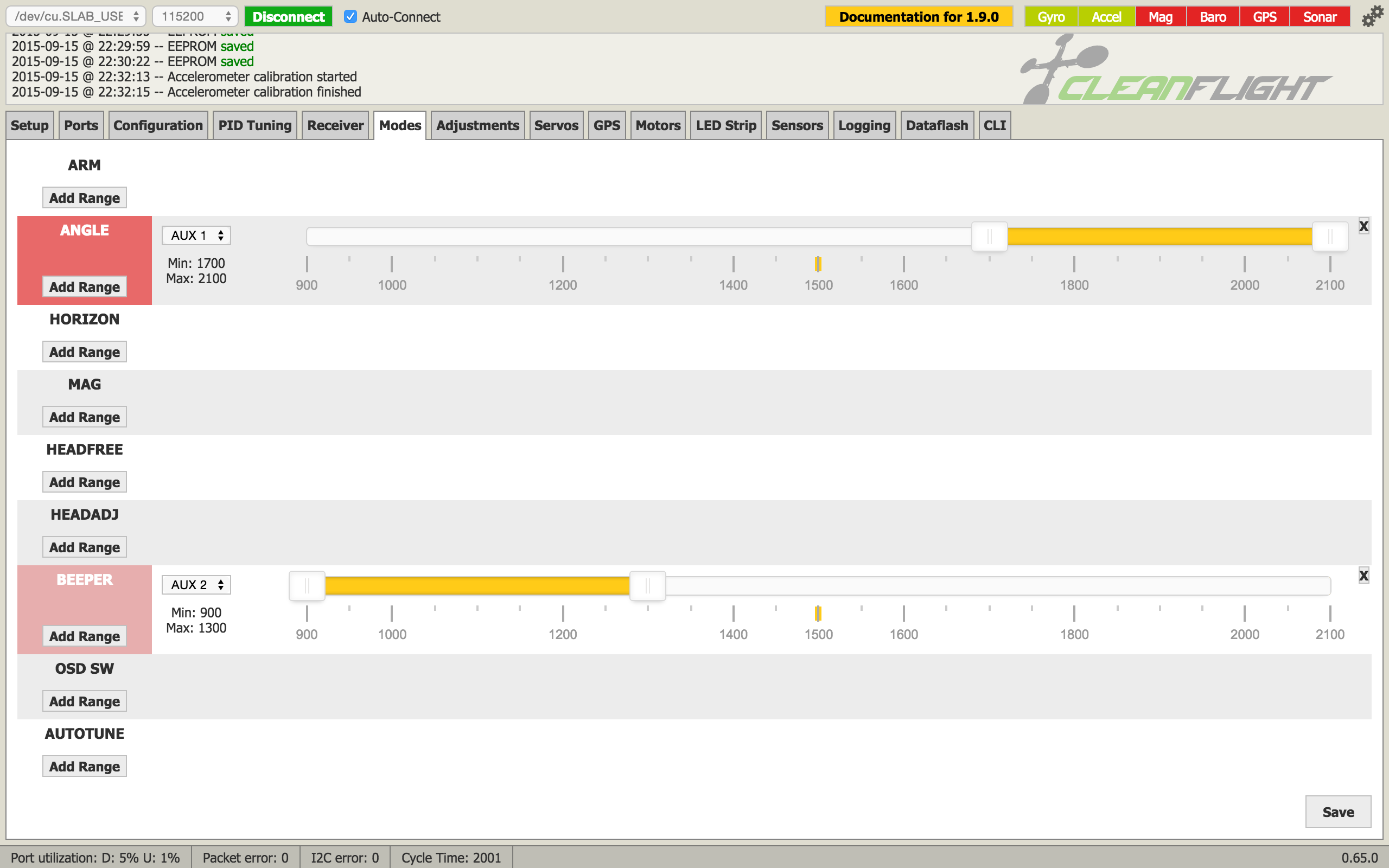
Ezután jöhetnek a Mód beállítások. Mivel az elején a konfig teszteléséhez jól jöhet, beállítok egy Angle módot is az egyik kapcsolóra (AUX1). Később ez ki fog kerülni, de most még jó lehet. Ezen kívül adok egy kapcsolót a Beeper-nek is, hogy távolról aktiválni tudjam a lost plane alarmot (elveszett gép riasztás). A csúszkán be tudjuk állítani, hogy az adott csatornák milyen értékei mellet aktíválódjanak az egyes funkciók.
Ezek után már csak egy dolog van vissza a PID és Rate beállítások. Ehhez válasszuk az Adjustments fület.
A részletekbe itt most nem megyek bele, csak annyira, hogy alapszinten fel tudjunk szállni. Szerencsére a CleanFlight alapbeállításai elég jók, ezért most csak annyit kell tennünk, hogy a PID Controller menüből kiválasztjuk az 1- Rewrite értéket. Az így kapott alapértékeken annyit változtassunk, hogy az LEVEL Proportional érétket 9.0-ról lejebb vesszük, mondjuk 6.0-ra. A Pitch és Roll Rate-et elsőre 0.45-0,5 körül érdemes hagyni, aztán később onnan lehet emelni.
Természetsen minden lapon a beállítások elvégézése után meg kell nyomni a Save gombot, hogy el is mentsük a beállításokat.
Ha ezekkel végeztünk, akkor készen is vagyunk az alapbeállításokkal. Ha összeállt a quad, már lehet is az első tesztrepüléseket végezni.