
Ezzel a poszttal már nagyon régen adós vagyok, de egyéb elfoglaltságaim miatt nem jutottam hozzá. De egy tízórás repülőút tökéletesen alkalmas erre a célra. :)
Magát az Alien vázat korábban már itt részletesen bemutattam, úgyhogy itt most tényleg csak az építésre fogok fókuszálni
Az építés során nagyban támaszkodtam Mr. Steele videójára, amelyben egy teljes építés folyamatát mutatja be durván felgyorsítva. Azóta már számos építési videó megjelent, többek között a gyártó, ImpulseRC YouTube csatornáján is.
Carbon Finish – szénszálas váz letisztázása
Korábban nem csináltam ilyet, de őszintén szólva még csak nem is nagyon hallottam róla. Viszont az Alien fórumon mindenki erősen javasolta, hogy a vadiúj carbon-fiber (szénszálas) váz éleit tisztítsam le. Ehhez az ImpulseRC a csomagban küldött két tűreszelőt. Korábban sokan a dörzspapíros (smirgli) módszert alkalmazták. Mindkettő megfelel a célnak, de mivel nekem a reszelők voltak kéznél, azokat használatam.
A dolog lényege, hogy az új szénszálas vázak a vágási pontokon nagyon élesek, esetleg mikro-sorjásak (kínai másolatok és egyéb gyengébb minőségű vázak rendesen sorjásak), ezért javasolt ezeknek az éleknek a letisztázása, tompítása. Ennek két fő oka van:
- Ne vágják el a vezetékeket, ill. Li-Po rögzítő pántokat, ESC rögzítő szigetelő-szalagot, illetve zsugorcsöveket.
- Kicsit segít megelőzni a delmainálódást, azaz a szénszálas váz felső rétegeinek leválását.
Én nagyon alaposan elszórakoztam ezzel, szerintem összesen kb. 1,5 óráig reszelgettem, még a legkisebb furatokat is. Időközben azért már tudom, hogy elég a külső éleket és a nagyobb belső kivágásokat letisztázni és tényleg elég egyszer csak végighúzni a reszelőt/dörzspapírt az éleken.
FIGYELEM: A szénszálas anyaggal való munkánál nagyon apró szénpor szabadul fel, amely a bőrt is irritálhatja, illetve a tüdőbe jutva gyulladást is okozhat. Ezért mindig viseljünk megfelelő védőfelszerelést (kesztyű, porvédő maszk), illetve cészerű az egész folyamatot finoman csordogáló csap alatt végezni.
 |
 |
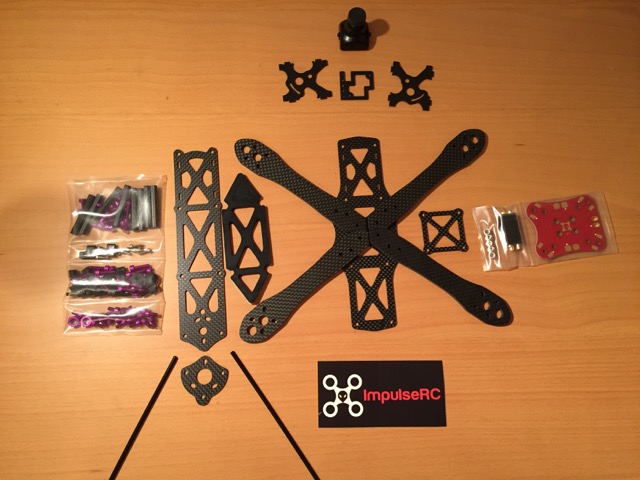
Balra a teljes szett, jobbra a két tűreszelő, amelyek a vázzal jönnek
PDB előkészítése
Miközben a vázat finomítgattam, a szünetekben előkészítettem a PDB-t (áramelosztó lap). Ez a következőkből állt:
- A PDB-re felszereltem az XT60 csatlakozót. Gyárilag jön hozzá egy XT60, amit az eredeti tervek alapján közvetlenül a PDB-be kellene beültetni. A gyakorlati tapasztalatok alapján azonban mindenki azt javasolja, hogy inkább egy rövid hangszálon (pigtail) rögzítsük az XT60-as anya-csatlakozót, mivel bukásnál az akksi kitépheti a direktben PDB-be ültetett csatit.
- A forraszpontokat bevontam forrasztóónnal.
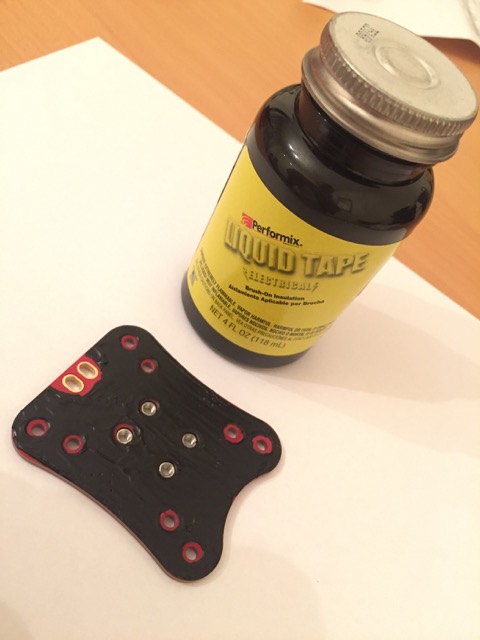
- Steele tanácsa alapján a PDB alját bevontam folyékony elektromos szigetelővel (Liquid Electrical Tape). Ez nem feltétlenül szükségszerű, de ennél az építésnél a maximalizmusra törekedtem. Némileg védi a PDB alját a sérülésektől. Ha a gyári utasítások alapján a PDB ponttal jelölt pólusait használjuk pozitívként, akkor a PDB alja fixen negatív (föld), azaz nem kell félnünk, hogy érintkezik az amúgy elektromosan vezető szénszálas vázzal.
- Be kellett húzni a PDB-be a szorítóanyákat, amelyekbe majd 4 rögzítőcsavart kell belefogatni. Ezek külön jönnek és a behúzáshoz az ImpulseRC egy dedikált csavart és egy alátétet is mellékelt.
 |
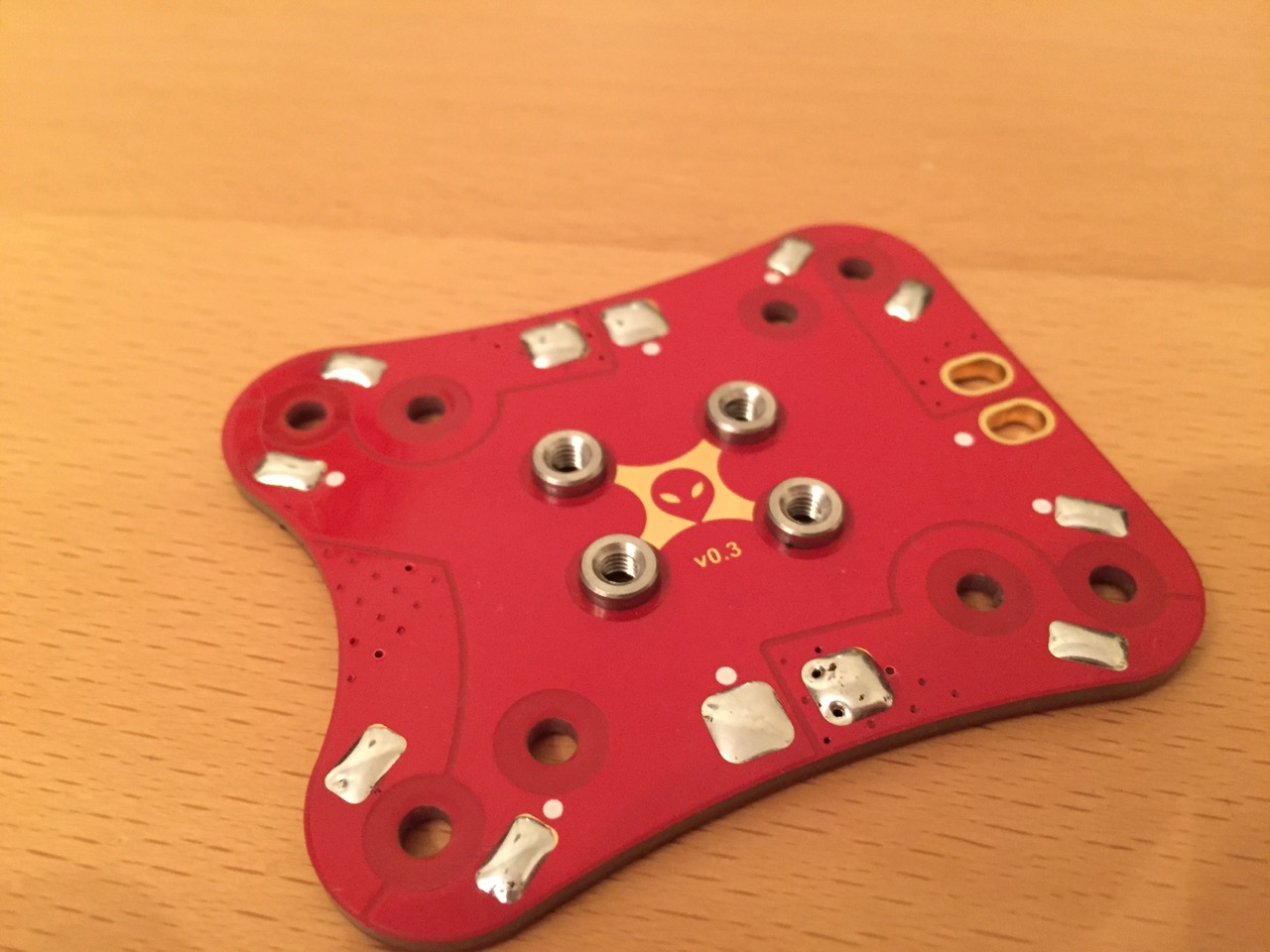 |
Balra a liquid electrical tape és a vele bevont PDB, jobbra a ónozott PDB középen a 4 szorító-anyával
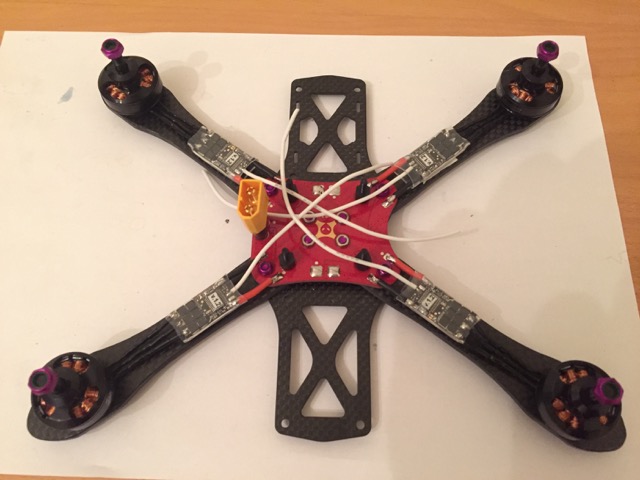
Az „alváz” összeszerelése
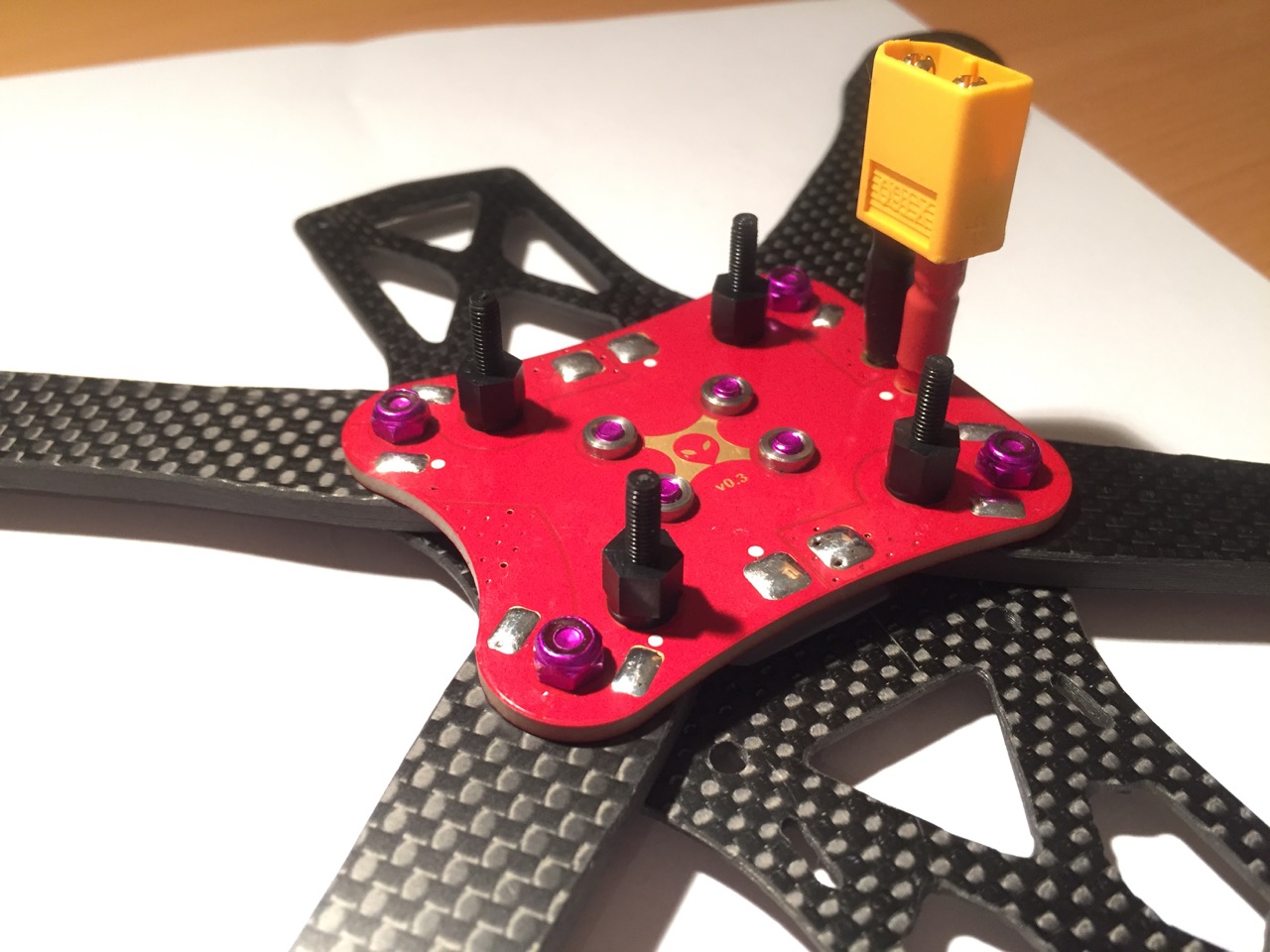
Ezt követően nem volt más hátra, mint összedobni az Alien alvázát. Ezt azt jelent az alaplapra egymás után ráhelyezem a 4 kart, majd a tetejére a PDB-t és minden kart első körben két csavarral rögzítek. Az egyik csavar (a legbelső) a PDB-be korábban integrált anyákba megy, a külső csavarok pedig önzáró anyákat kapnak.
Majd végül bekerülnek a karonként középső csavarok is, amelyeket anya gyanánt az a műanyag távtartó fog, amely a repülésvezérlőt hivatott tartani.
Ez a folyamat – a váz átgondolt tervezésének köszönhetően – rendkívül egyszerű és magától értetődő. A karok középen teljesen összezárnak, így osztva meg az oldalirányú ütésekből származó terhelést. A karokon a furatok úgy vannak kialakítva, hogy csak egyféleképpen lehessen őket egy adott pozícióban rögzíteni, mégis mind a 4 kar egyforma. Ez egyébként rendkívül gyors és egyszerű karcserét tesz lehetővé, ha egyszer arra lenne szükség.
Ezzel össze is állt a váz alapja, ami rendkívül merev, erős, stabil platform a további építésre.

Kameratartó összeépítése
Az Alien váz egyik legnagyobb újítása a tejesen egyedi kamerarögzítési megoldás, amelyek kimondottan a most legkedveltebb Surveillzone HS1177 modellhez találtak ki. Ez a foglalat stabilan, rezgésmentesen rögzíti a kamerát, mégis szabad elérést biztosít a csatlakozóknak és ami a legfontosabb, 5 fokos szögen, 0-35 fok között dönthetővé teszi a kamerát egyszerűen két csavar lazításával. Az építésről vannak dedikált videók is, itt most álljon egy kép erről a szerkezetről:
 |
 |
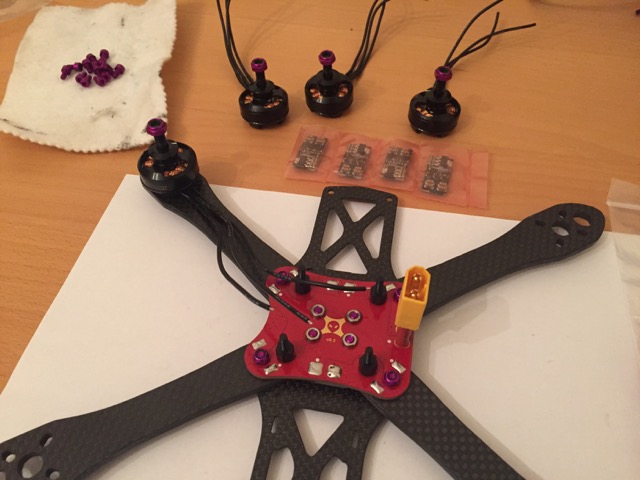
Motorok- ESC-k
Most, hogy a váz alapja megvan, elkezdhetünk az elektronikával foglalkozni. Én az első építést KISS ESC-kkel végeztem, de a folyamat ugyanaz, ha LittleBee 20A-t használunk, csak előtte le kell csupaszítani őket.
Első lépésben csak két csavarral lazán felfogattam az egyik motort, majd elhelyeztem az ESC lapkát a vázon, és a motorvezetékeken bejelöltem, hogy hol kell levágni őket a megfelelő csatlakoztatás érdekében.
Ezt a méretet véve levágtam mind a 4 motor vezetékeit és lecsupaszítottam, valamint ónoztam őket. Majd a csupasz ESC lapkákat is előónoztam.
A motorokat még leszerelve, a munkapadon szépen, direktben hozzáforrasztottam az ESC PWM kimeneteihez. Az ESC bemeneti oldalára ráforrasztottam a pozitív és negatív kábeleket, valamint csak a jelvezetéket (nem forrasztottam ESC föld vezetéket, a többségnek ez működik, de előfordulhat, hogy kellhet később). Ezek hosszára most még ráhagytam. Amikor mind a 4 kész volt, alkohollal és egy fülpiszkálóval letisztítottam az ESC-k mindkét felületét, megtisztítva őket a gyanta maradékoktól, vagy esetleges óngömböcskéktől.
Mivel mind a 4-et direktben forrasztottam, a KISS esetében a CCW forgású motoroknál össze kell forrasztani az irányváltó forraszhidat. A LittleBee-knél a forgásirány a BLHeli Suite-ból változtatható. Ott pont fordítva van, a CW-ket kell megfordítani.
Levágtam az ESC lapkának megfelelő kis méretű zsugorcsövet és ráhúztam a tápvezeték felöl az ESC-re.
Ezután felszereltem a motorokat végső helyükre a karok végére. Én 4 csavart használok (FinalGlideAUS esküszik, hogy kettő is elég) és természetesen a kék csavarrögzítővel is bekentem a csavarokat.
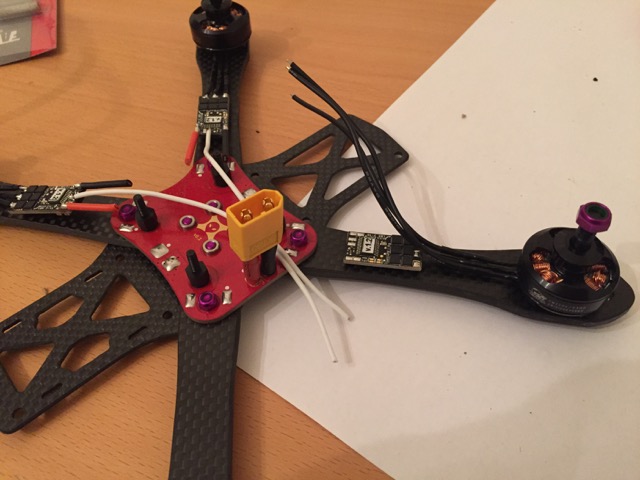
Ezután kimértem az ESC tápvezetékeit, levágtam, blankoltam és ónoztam, majd szépen beforrasztottam őket a PDB megfelelő pontjaira. Az Alien váz tervezésében zseniális, hogy minimális vezetékhosszra van szükség. Így kisebb az esélye az elektromos zavarnak, vagy a vezeték fizikai sérülésének és nem utolsó sorban esztétikusabb is. A vezetéket azért nem kell ultra feszesre szabni, egy kis tartalék legyen benne, hogy a kar minimális mozgásának teret adjon.
Miután ezzel megvoltam, rámelegítettem a zsugorcsövet az ESC-re (ezt akár egy lépéssel előbb is meg lehetne csinálni, de akkor még nem voltam ennyire biztos a KISS forgásirányában, ezért hagytam a végére), majd a zsugorcső és az ESC közé egy megfelelő méretű kétoldalas ragasztót toltam, ezzel rögzítve az ESC-t. Biztos, ami biztos még az ESC-t és a kart együtt áttekertem szigetelőszalaggal is.
Ezzel a meghajtás el is készült.
Repülésvezérlő és egyéb elektronika
Repülésvezérlőnek a Seriously Dodo F3-as vezérlőt választottam, annak is a Rev. 3-as verzióját. Ez a vezérlő többek között azért is szuper, mert integrált BEC-cel, azaz 5V-os (500 mA terhelhetőségű) egyenáramú táppal rendelkezik, amely egyből VBat (akkumulátor-feszültség mérés) funkcióval is rendelkezik. Magyarul egyetlen csatlakozás kell neki és azzal táplálja saját magát, a vevőt és esetemben még a MinimOSD Micro-t is. Szóval az ehhez szükséges kétpólusú szervocsatlakozót direktben forrasztottam a PDB egyik kimenetére, a másik oldalra pedig a VTx (video-jeladó) tápelletásához szükséges JST csatlakozót forrasztottam.
Annak érdekében, hogy az építés a lehető legtisztább legyen, csak egyetlen tüskepárt forrasztottam a vezérlőre, a tápfeszültség csatlakoztatásához. Az összes többi csatlakozást direktben forrasztottam.
Ez a másik zseniális a Dodoban. Minden csatlakozás átmenőfurattal van kialakítva, így akár az összes vezeték tetszés szerint forrasztható direktben, illetve tüskék segítségével, igény szerint.
Az ESC jelvezetékeket is beforrasztottam. A KISS ESC-k firmware-ét nem is lehet/kell frissíteni, a BLHelis szabályozókét pedig a CleanFlight/BetaFlight PassThrough funkciójának köszönhetően a vezérlőn keresztül (annak USB portjára csatlakozva) a BLHeli Suite-tal meg tudom oldani.
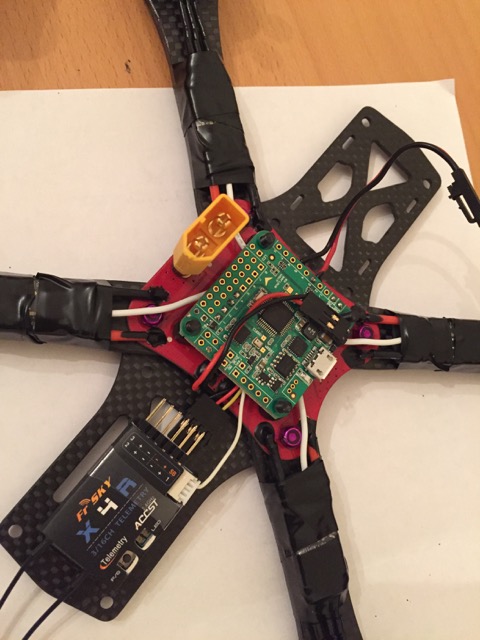
Mindent direktben forraszttam, kiéve az FC tápot
Szintén direktben forrasztottam a vezérlő UART3 portjára az FrSky X4R vevő táp és jelvezetékeit, az UART1-re pedig ugyanazon vevő S.Port Telemetria vezetékét.
Ezen kívül még forrasztanom kellett az UART2 TX és RX vezetékeit és egy föld, valamint egy +5V csatlakozást a MinimOSD Micro-hoz. Végül pedig jött az 5V-os csipogó. Sajnos ezt nem tudtam direktben a vezérlőre forrasztani, de egy rövid vezetékkel ez is meg lett oldva.
Az ESC jelvezetékeket is olyan rövidre szabtam, ami ahhoz kellett, hogy normálisan meg tudja emelni a vezérlőt is forrasztani alulról, ha kell. Semmi több.
A vezetékek egy része a vezérlő alatt, egy másik része a vezérlő felett halad át. Ezzel együtt nagyon elégedett vagyok, mert nincs sehol gubanc.
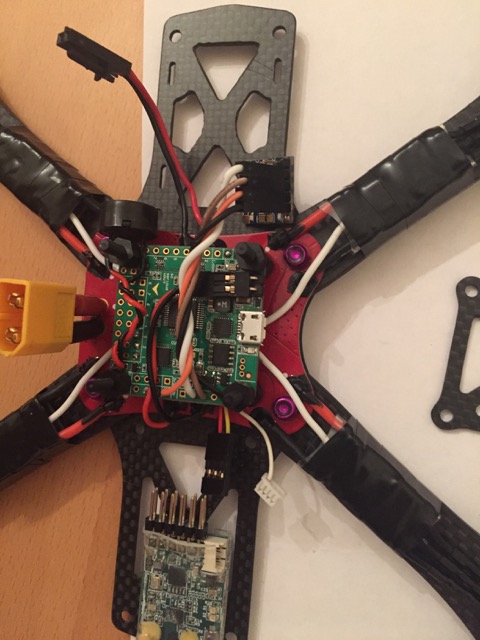
Itt már minden csatlakozó és vezeték a helyén van, az FC véglegesen rögzítésre került
Vevő elhelyezése
A vevő helyét az Alien tervezése és az antennáknak kialakított helyek meghatározták. Ez alapján a vezérlő mögé, a padlólemezre rögzítettem. Az FrSky X4R vevőt kivettem a gyári papír „házából” és egy átlátszó zsugorcsövet raktam inkább rá. Majd pedig egy M3 DualLock tépőzárral rögzítettem.

Ezzel lényegében a gép már működőképessé vált. Ezen a ponton egyébként ki is próbáltam mindent.
A Dodo vezérlőt még korábban Flasheltem a BetaFlight akkor legfrissebb (talán 2.1.2?) verziójával. Most elvégeztem az alapvető konfigurálást. Bindeltem a vevőt a távval, majd bekonfiguráltam a CleanFlight konfigurátorral az S.Bus csatalkozást és a TAER1234 csatornasorrendet. Szintén bekonfigoltam a Telemetria portot is. Elforgattam a vezérlőt 90 fokkal, ahogy adja magát, hogy az USB a jobb oldalon legyen (a gép bal oldalán ott az XT60 csatlakozó, az útba lenne).
Amikor ezzel megvoltam – szigorúan az áramkorlátozó használatával és persze propellerek nélkül – bepöccentettem a gépet és ellenőriztem a funkciók működését. A legnagyobb örömömre, minden tökéletesen működött. :)
FPV rendszer beépítése
A gép befejezéséhez már nem volt más hátra, mint az FPV rendszer telepítése. Mielőtt ebbe belekezdtem volna, felszereltem a vázra a fő oszlopokat, amelyek a tetőlapot tartják. Az FPV rendszer a kamerából, a MinimOSD-ből, a VTx-ből és az antennából áll.
A kamerát már korábban rászereltem az állványra, tehát azt most beillesztettem az első két oszloppár közé.
A vezérlő távtartóinak tetejére rászereltem azt a kis karbon lapot, amely a VTx-nek ad helyet. A VTx antenna helye szintén adott az Alien vázon. Az adó és az antenna között egy kis 5 centis vezetéket használtam, amely 90 fokos csatlakozóban végződik, amelyet egyből a váz tetőlapjára lehet rögzíteni.
Az egyetlen kérdés a MinimOSD elhelyezése volt. Mivel ebből a Micro verziót használom, nem túl nagy a helyigény, simán elférne elvileg a vezérlő tetején is, viszont a konfigurálás és a flashelés miatt erre kénytelen voltam 5 tüskét beforrasztani. Végül úgy döntöttem, hogy közvetlenül a vezérlő előtt a padlólemezre ragasztva helyezem el. Így még éppen nem gátolja a kamera maixmális dőlését.
Most már csak a VTX-OSD-Kamera kábelháromszöget kellett legyártani. A kamerát az ImmersionRC 600mW-os VTx szabályozott 5V-os kimenetéről hajtom, kiküszöbölve ezzel az elektromos zavarokat. A +5V tehát direktben megy a kamerára. Viszont a jel és föld vezetékeket átviszem az OSD és azon keresztül érnek el a kamerához. Szerencsér ezeket megint csak tudtam direktben forrasztani. Mivel így a MinimOSD két egymásra merőleges oldalán is vannak csatlakozások, nem tudtam ráhúzni zsugorcsövet, cserébe kéznél volt a folyékony szigetelőszalag, amivel szépen bevontam az egészet.
Ezután csatlakoztattam a videóvezetékeket, a VTx tápját, az antennát. Még egy gyors tesztet végeztem és persze a kamera beállításait bekonfiguráltam KrazyFPV javaslatai alapján. A fókuszon nem is kellett állítani, gyárilag jó volt.
Végül felszereltem a tetőlapot, rögzítettem rá a videoantenna foglalatát és feltekertem az antennát is.
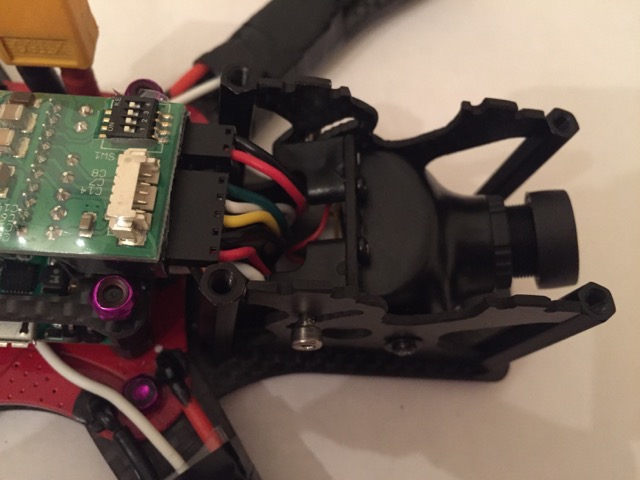
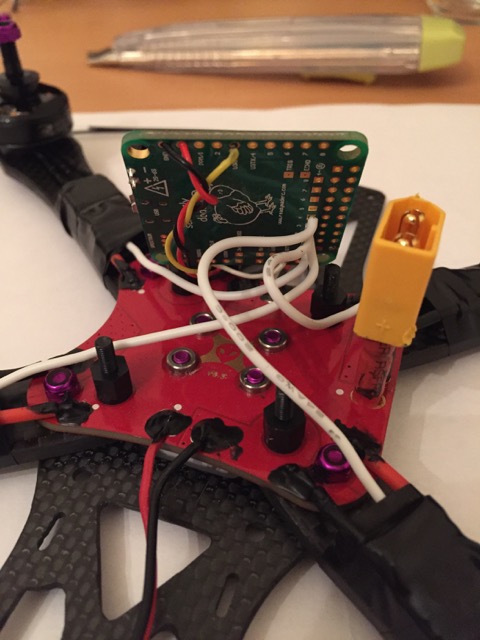
Itt már helyén a kamera. Pont befér alá a MicroMinimOSD. A VTX is rögzítve van. Itt sem kellenek hosszú vezetékek. A kamera a tápot a VTX 5V-os kimenetéről kapja
Ezután már csak a végső teszt volt hátra, először propellerek nélkül, aztán, amikor láttam, hogy az irányítás is rendben van, egy röpke lebegéssel a szobában.
Elsőre feltűnt, hogy mennyire stabil a gép a korább Nighthawkhoz képest. Nagyon könnyen helyben lehetett tartani, nem vándorolt sehová.
Az eredményről időközben már biztos láttátok a képeket és videókat is.




