
Most, hogy a quad szinte már repképes állapotban volt, jöhetett az FPV rendszer. Ez nálam a következőkből áll:
- Sony 1/3 CCD 700 VTL kamera
- MiniOSD
- BossCam TS353 VTx
- BossCam Cloud Spirit RHCP Antenna
- A tápellátást a korábban már említett 12V UBEC biztosítja
A tápot az UBEC-ről közvetlenül a VTx-be küldöm. A kamera áramellátása már a VTx-ről jön. A Video jel vezetékébe a kamera és a VTx között beékelem az OSD modult (értelem szerűen a kameráról jövő vezetéket a Vid In, a VTx felé menő pedig a Vid Out csatlakozóra megy). Valahogy így:
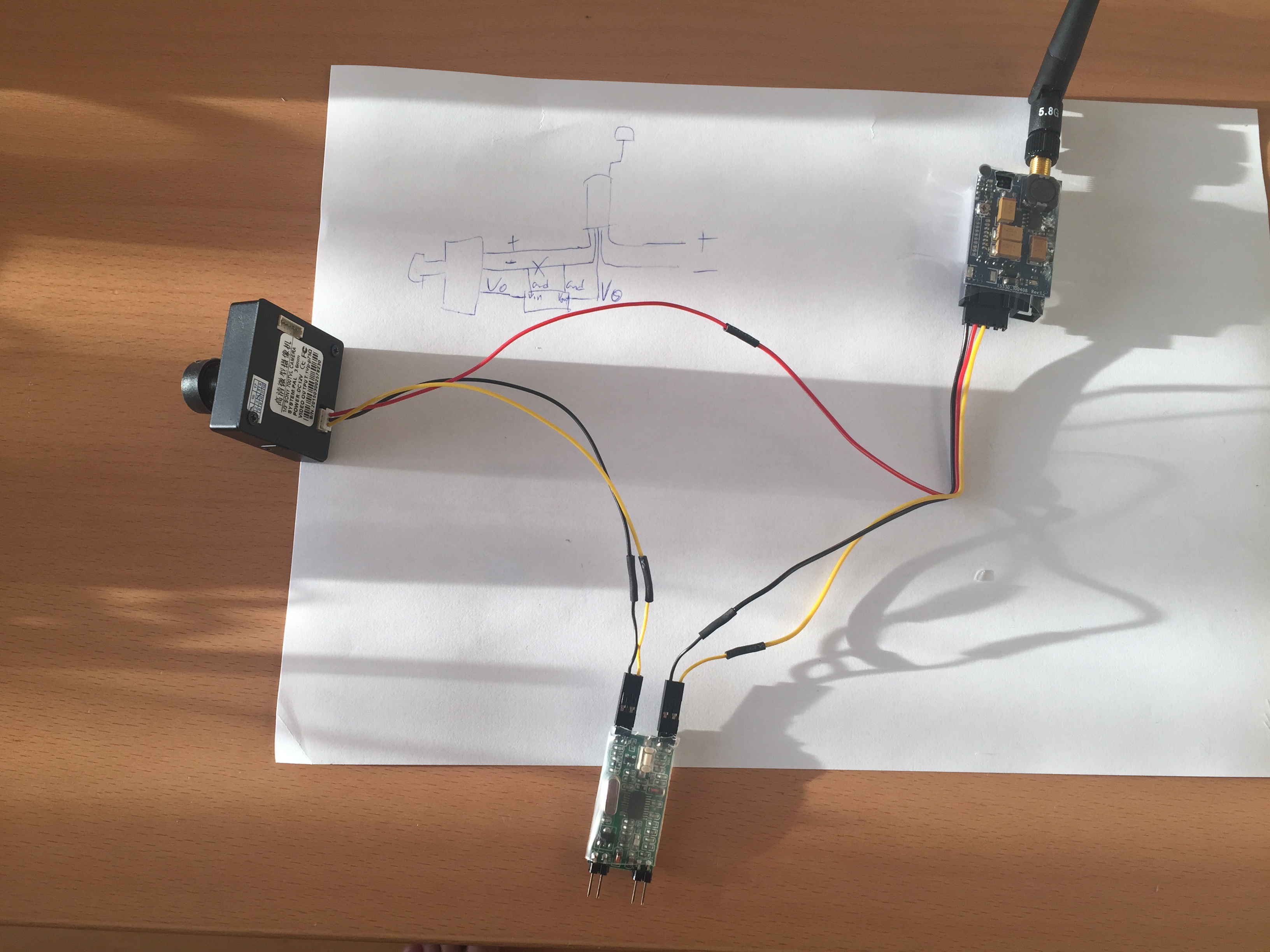
Az OSD természetesen a BAT1 bemenetére kapja a korábban beforrasztott vezetéken keresztül a közvetlen tápot a repülési akksiról. A neve ellenére a MiniOSD annyira nem is mini. Keresztbe ragasztottam fel és olyan széles, hogy a rádugott csatlakozók némileg túllógnak az alaplemez szélén. Ez most nem gond, de ha egyszer 6"-os propellerekkel próbálkozom, akkor erre figyelni kell.
A következő fejtörést a kamera rögzítése jelentette. Van hozzá egy kis állvány (a fenti képen most nincs rajta), amivel nem fér el a tetőlemez alatt. A nagyobb gond, amivel most szembesültem, hogy az állvány nélkül sem fér be a tető alá. Ekkor arra gondoltam, hogy szépen kiszedem a tokból és a vázhoz adott rögzítőlemezhez csavarozom nylon csavarokkal, ahogy szinte mindenki. De megint csak rá kellett jönnön, hogy ennél a kameránál a lencsét a ház tartja. Ha leszedem a házat, nem tudom hova becsavarozni a lencsét. Szóval szívás. Ezen még gondolkozni kell.
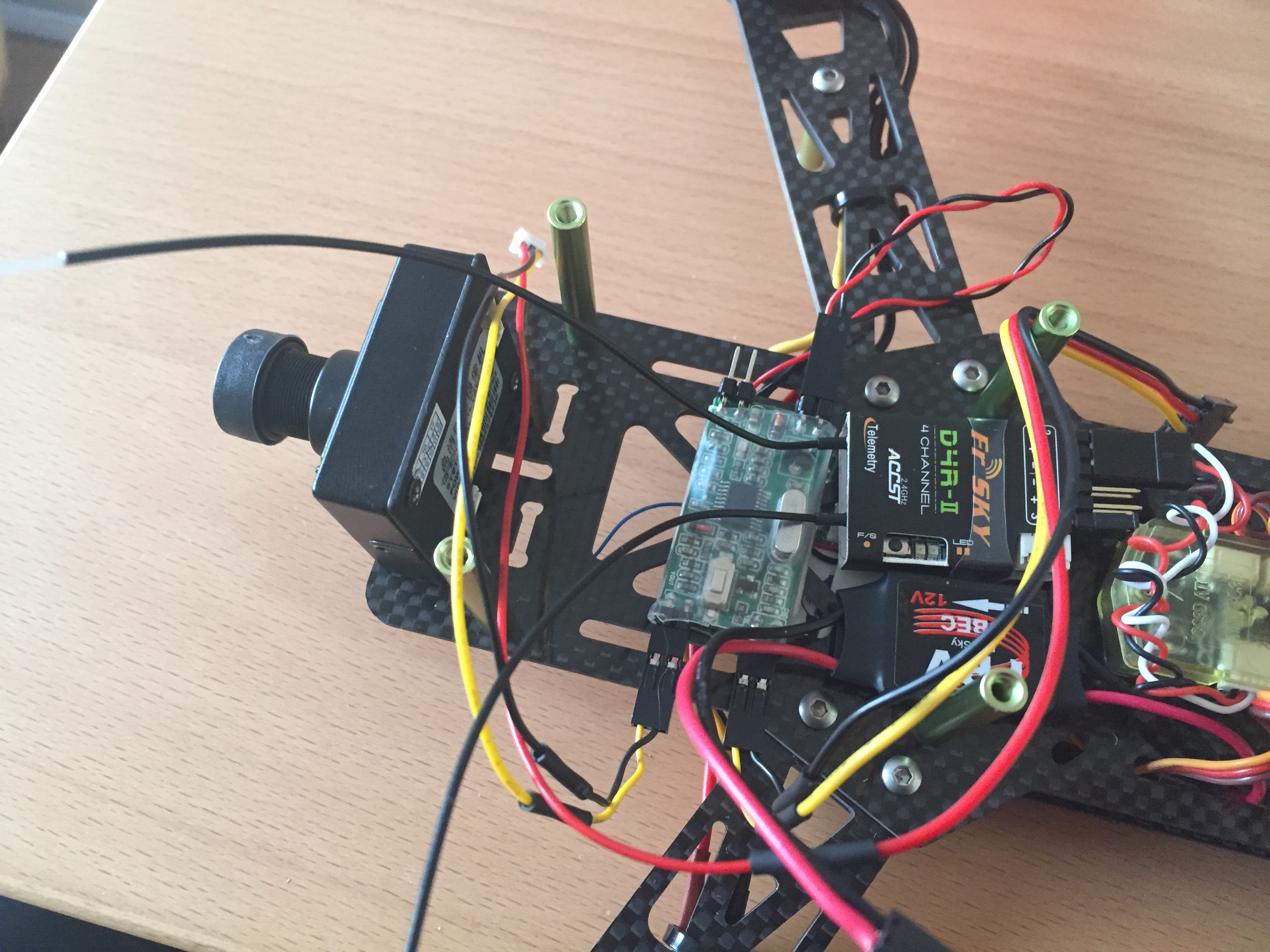
A VTx-et, helytakarékosságból a tetőlemez aljára ragasztom, illetve gyorskötözővel is rögzítem, mivel egész komoly súlya van (a nagy hűtőborda miatt). Eredetileg minél előrébb akartam, de ezzel két gond merült fel.
- Nem tudtam volna tőle az Rx antennát normálisan kivezetni a tetőre
- Nehézkes lett volna a hozzáférés a DIP kapcsolókhoz, amelyekkel a videocsatornát lehet változtatni.
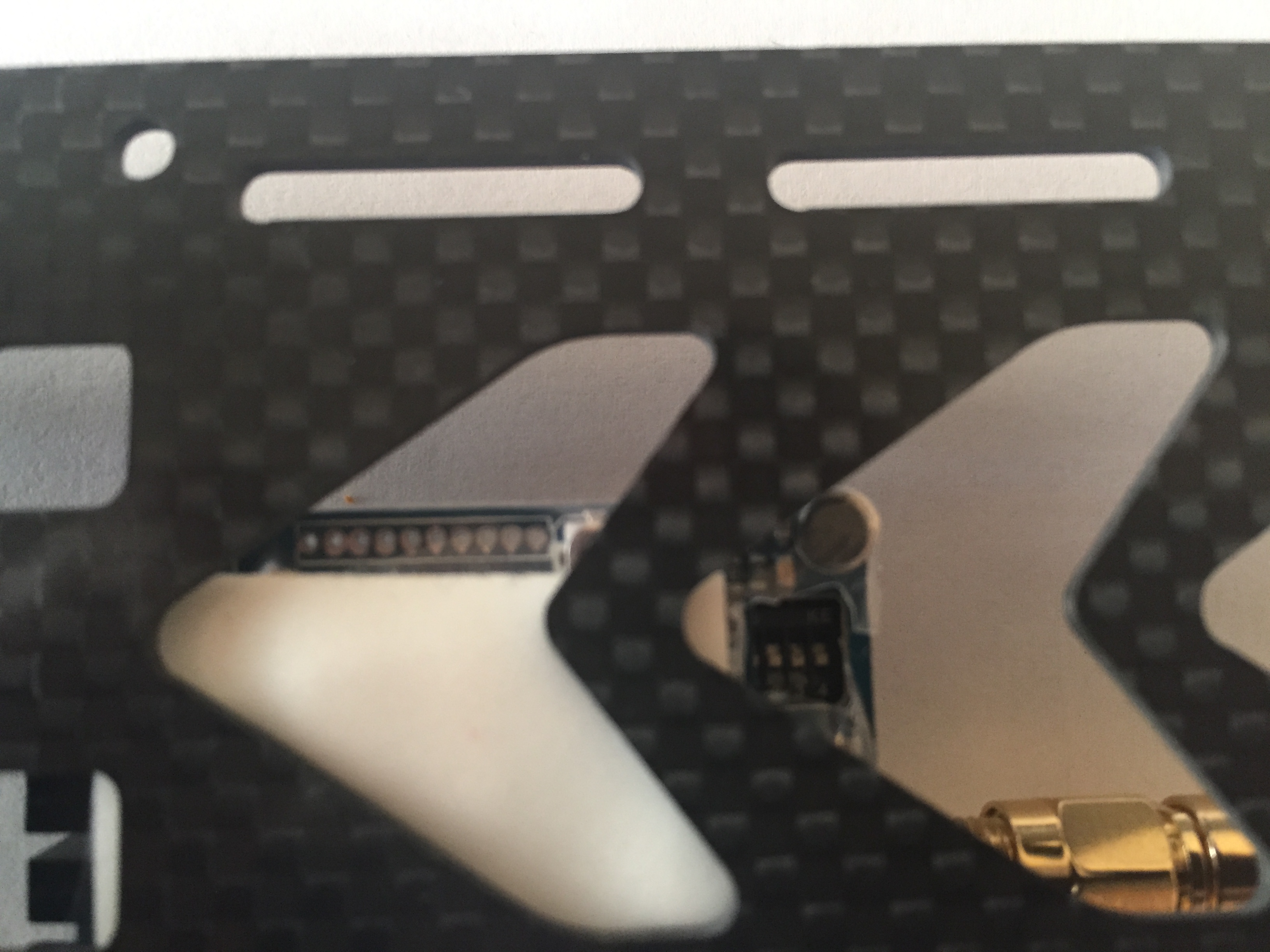
Végül középtájra került. Így a gombaantenna is pont kiér a végén, nem is volt szükségem arra a hosszabítókábelre, amelyet korábban beszereztem.

A DIP kapcsolók így "kényelmesen" hozzáférhetők a tetőn keresztül. Persze ki kellett vágnom előtte a zsugorcsöves borítást, amivel az egész VTx-et bevonták a kis kínaiak. :)
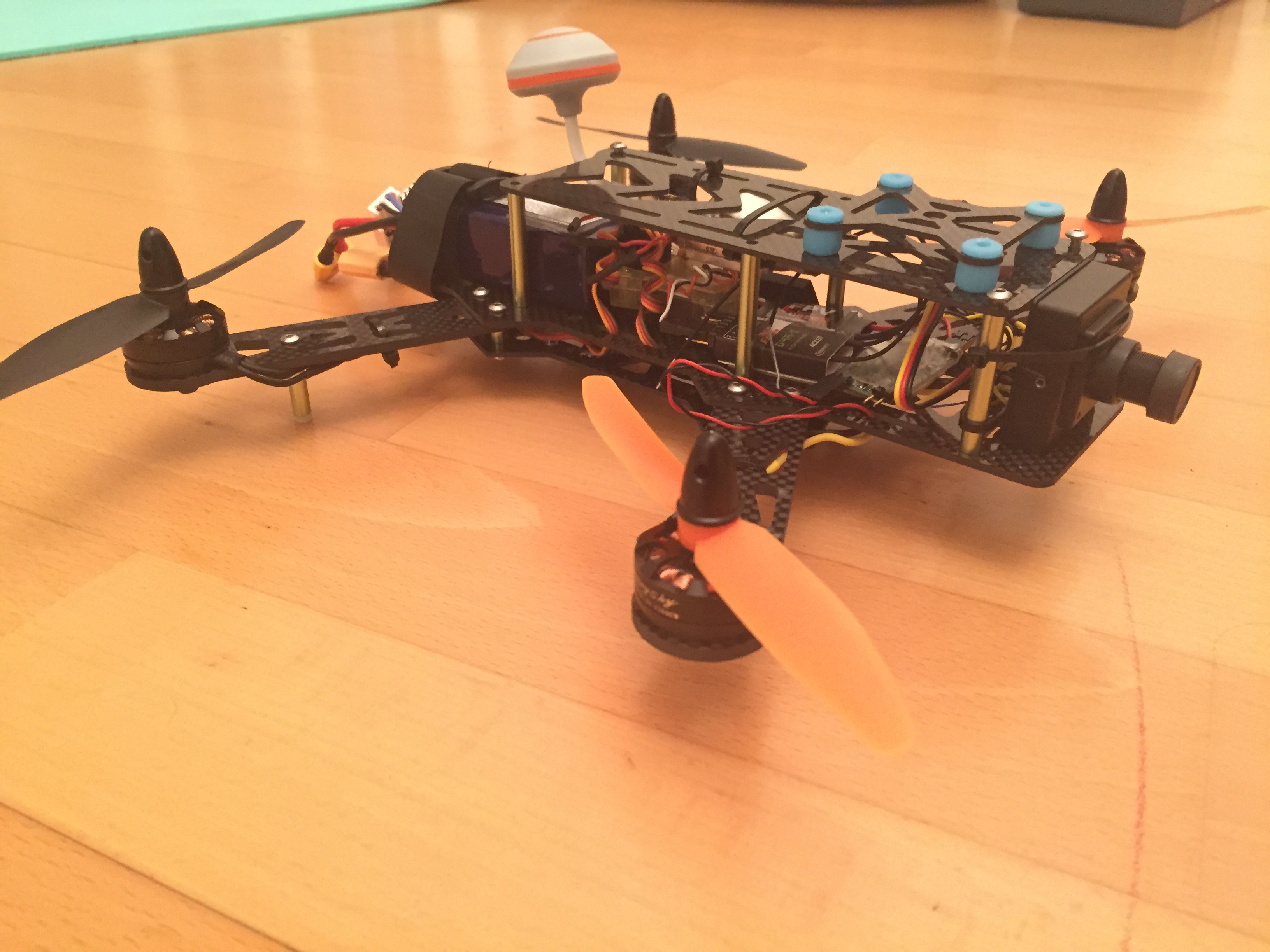
Ezek után gyorsan rádobtam a tetőlemezt, hogy lássam, hogy néz ki az egész. Itt persze még nincsen minden véglegesítve, vezetékek lógnak mindenfelé, az Rx antenna nincs kivezetve és rögzítve, a kamera is csak ideiglenesen van rákötözve, stb. De mégis, akartam látni, hogy mi lesz belőle. :)






{kind=link}