És kész....
Az utóbbi időben nem sokat írtam, mert azt a kis szabadidőmet, ami akadt azzal töltöttem, hogy megépítem a talán első magyarországi Alient.
Ma este elkészült a nagy mű és nem csak, hogy elégedett vagyok vele, de kifejezetten büszke vagyok rá. Nem volt hiábavaló az a rengeteg felkészülésre, tervezésre, forumok olvasgatására fordított idő. Minden összeállt és úgy működik, ahogy kell. Nagy részben köszöhetően a váz rendkívül átgondolt kialakításának, egy rendkívül tiszta, mindenféle sallangtól (és kábelcsomóktól) mentes gyönyörű és persze ultraprofi gépet sikerült összeraknom.
Most már csak azt kell megtudni, hogy ettől majd valóban jobban fogok-e repülni? :DDDD
Akit az építés részletei érdekelne, az se keseredjen el, folyamatosan készültek a képek és most, hogy a gép már kész, elkezdem írni a Build Blogot is.





A specifikció:
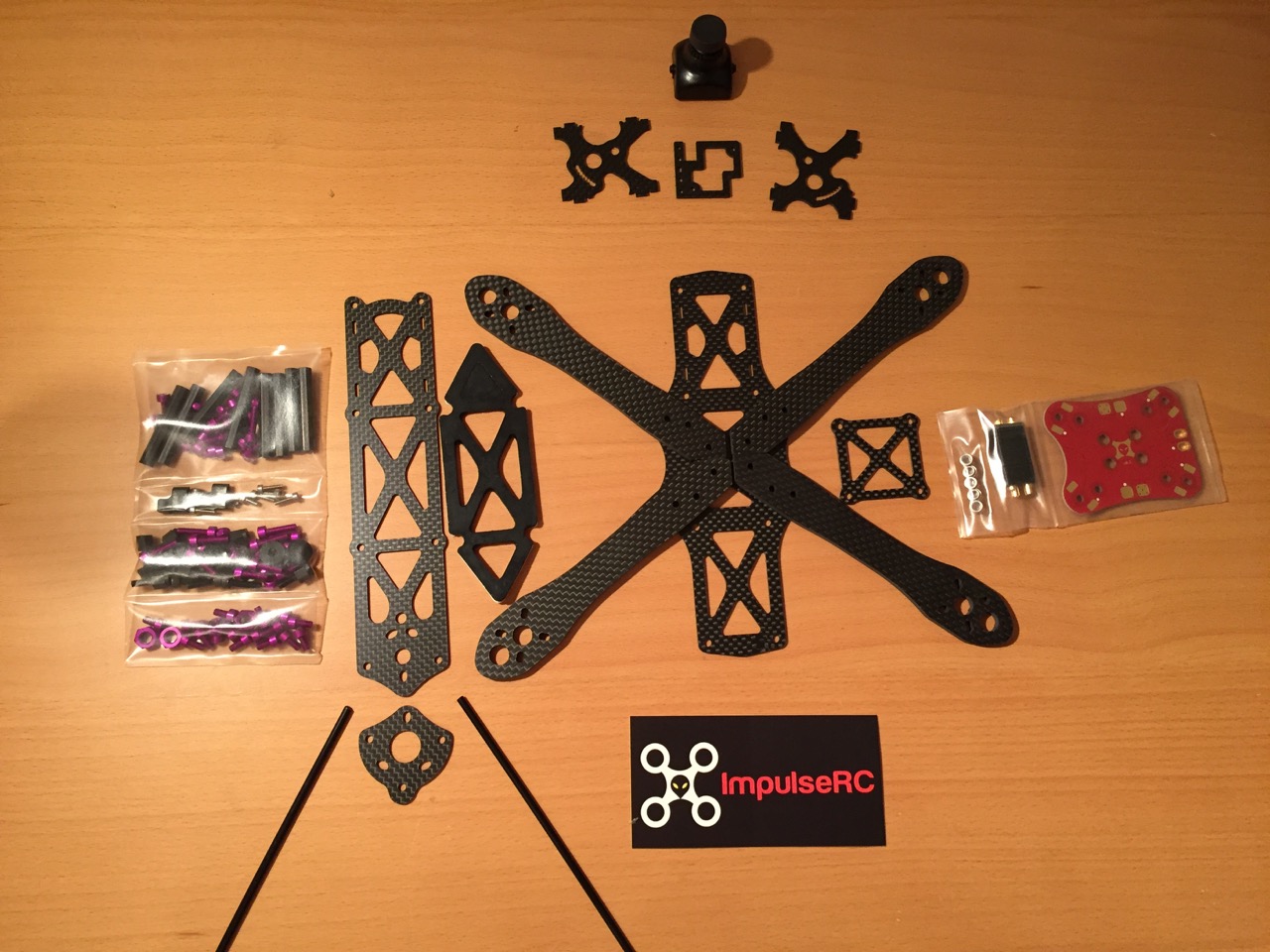
ImpulseRC Alien 5" Frame
RMRC Seriously Dodo F3 Rev. 3 vezérlő
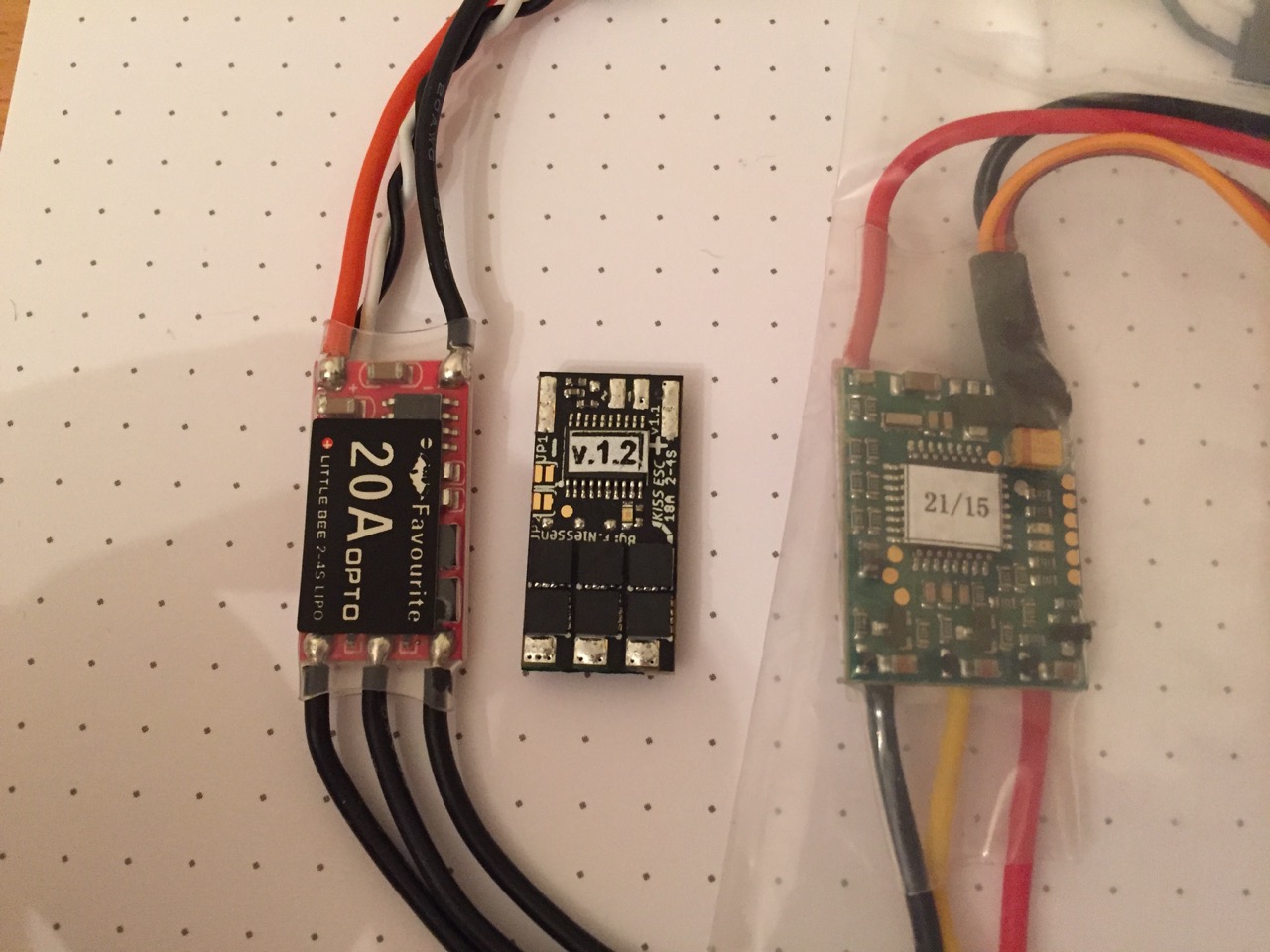
KISS 18A v1.2 ESC-k
Cobra 2204/2300KV mocik
HS1177 FPV Cam
IRC 600mW RaceBand VTx + SpiroNet
FrSky X4R-SB vevő
Dinogy 4S 1300 mAh 65C akksi
AUW: 517g (Akksival, de GoPro nélkül)