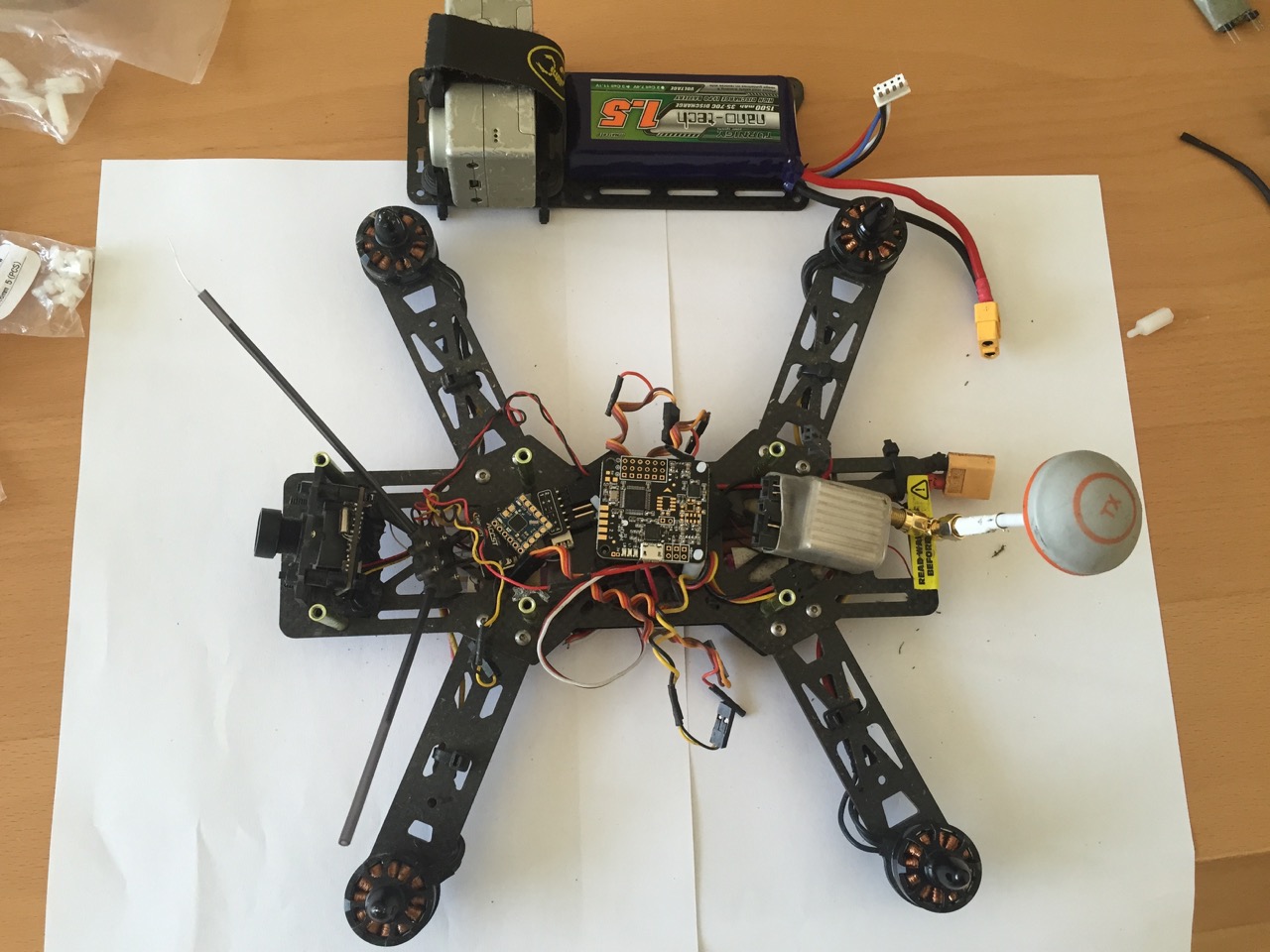
A repülésvezérlő cserét arra is haszáltam, hogy kicsit átvariáljam a gép kialakítását. Főleg a videóvevő elhelyezése nem tetszett. Ha viszont ahhoz hozzányúltam, akkor az akksival is kellett kezdeni valamit. Mivel a CC3D kiszereléséhez amúgy is szét kellett kapni a gépet, ez kapóra jött. A padlólemez alatt elhelyezett PDB-hez és az ESC-khez most nem nyúltam, a többi alkatrészt azonban mind lekaptam a gépről.
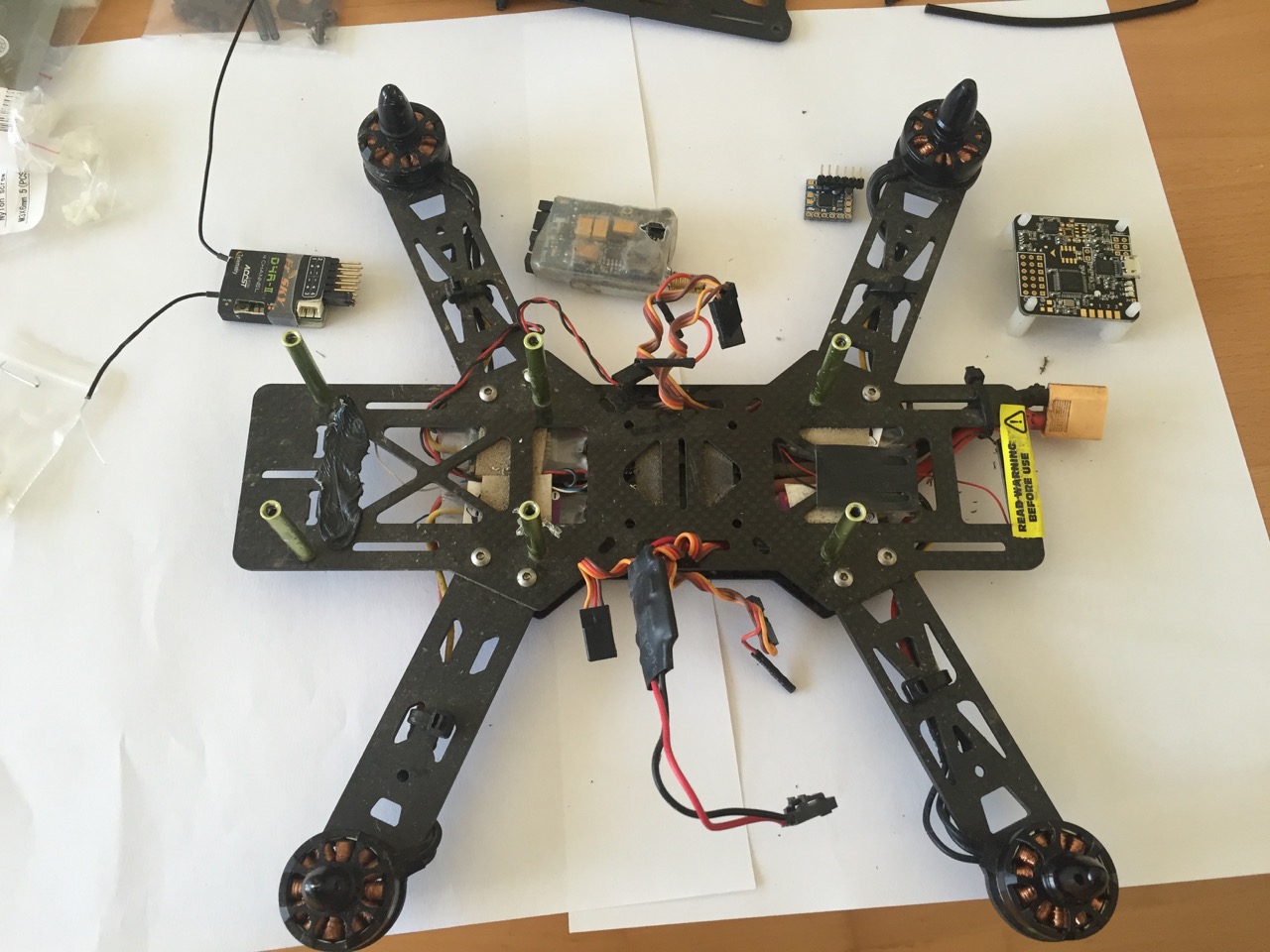
Az átépítés első fázisa, a bontás után
Ezután elkezdtem kicsit legózni, hogy miként fognak szépen elférni az alkatrészek. Rájöttem, hogy a Naze32-őt mindenképpen el kell forgatnom, mert alapállapotban hátrafelé lenne az USB port, ami nagyon nehezen lenne megközelíthető, a komponensek tervezett elhelyezése mellett. Ez még egy további szempontból is kapóra jött. Mivel a motorokat a 90 fokban dötnött szervótöskékre csatlakoztatom, amelyek az elforgatást követően oldalra kerültek, így a gép megbontása nélkül hozzáférek az ESC-k szervócsatlakozóihoz és tudom őket Flashelni a BLHeli Suite-tal, ahogy az új verziók jövögetnek kifelé.
Itt egyelőre csak random feldobáltam az alkatrészeket, hogy megnézzem, hogy fognak elférni egymás mellett
A Naze32-re a szervótüskéken kívül csak azt forrasztottam fel, amit nagyon kellett. Mivel a vevőt PPM módban csatlakoztatom, ezért nem raktam fel az RC tüskéket a Naze-re, hanem azt a három vezetéket direktben ráforrasztottam a vezérlőre. Ami itt nem látszik, hogy további két tüskét azért felraktam, az UART2 eléréséhez, amelyen keresztül a MinimOSD-be küldöm az adatokat.
Mivel a MinimOSD-t a repülésvezérlőről fogom adatokkal táplálni, ezért itt is csak azokat a tüskéket forrasztottam fel ami ehhez kell (Serial összeköttetés a vezérlővel, illetve programozás), valmaint a Video IN és OUT jel és föld tüskéi kerültek a másik oldalra.
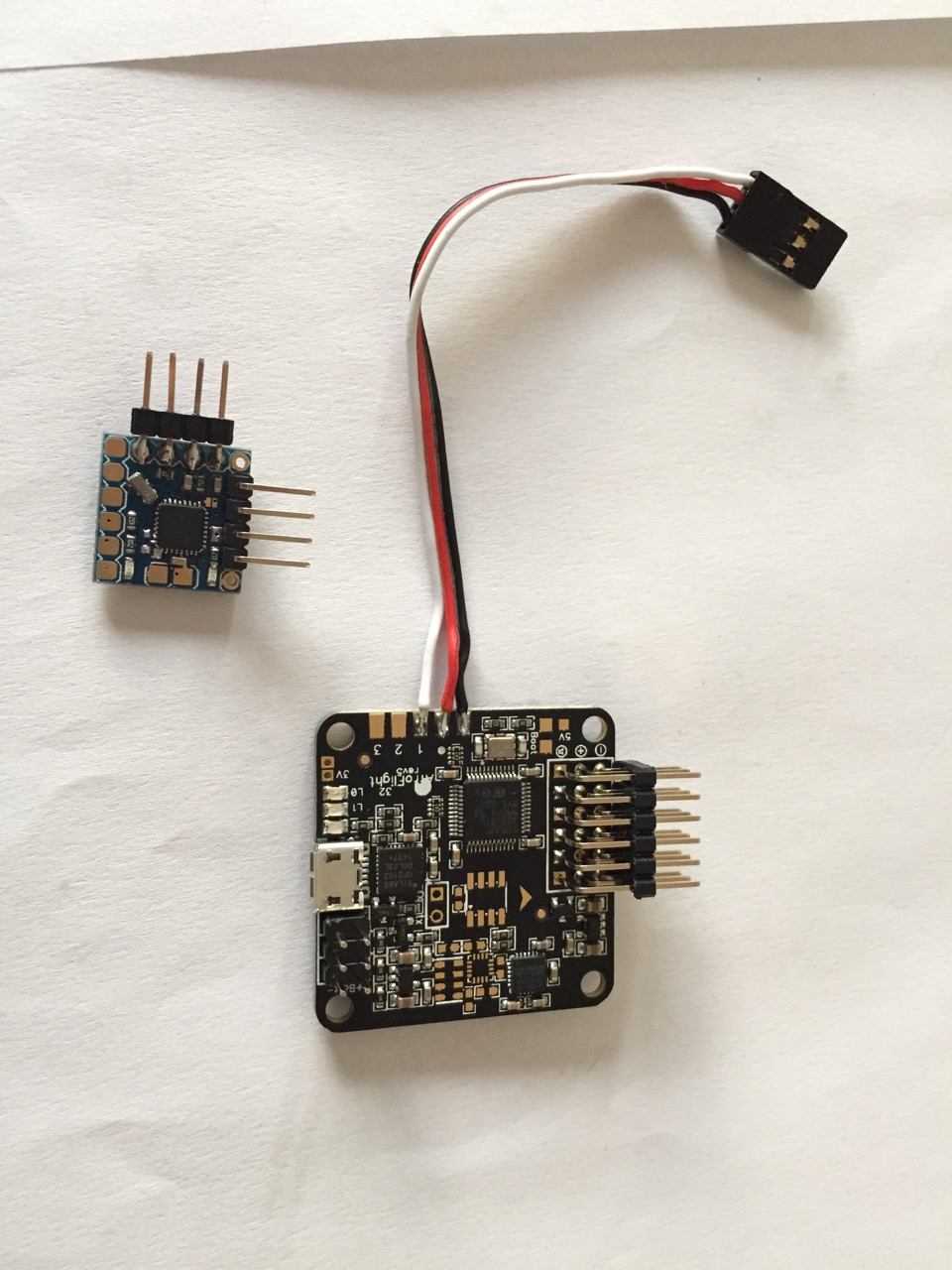
Csak annyi tüskét raktam fel, amennyire szükség lesz.
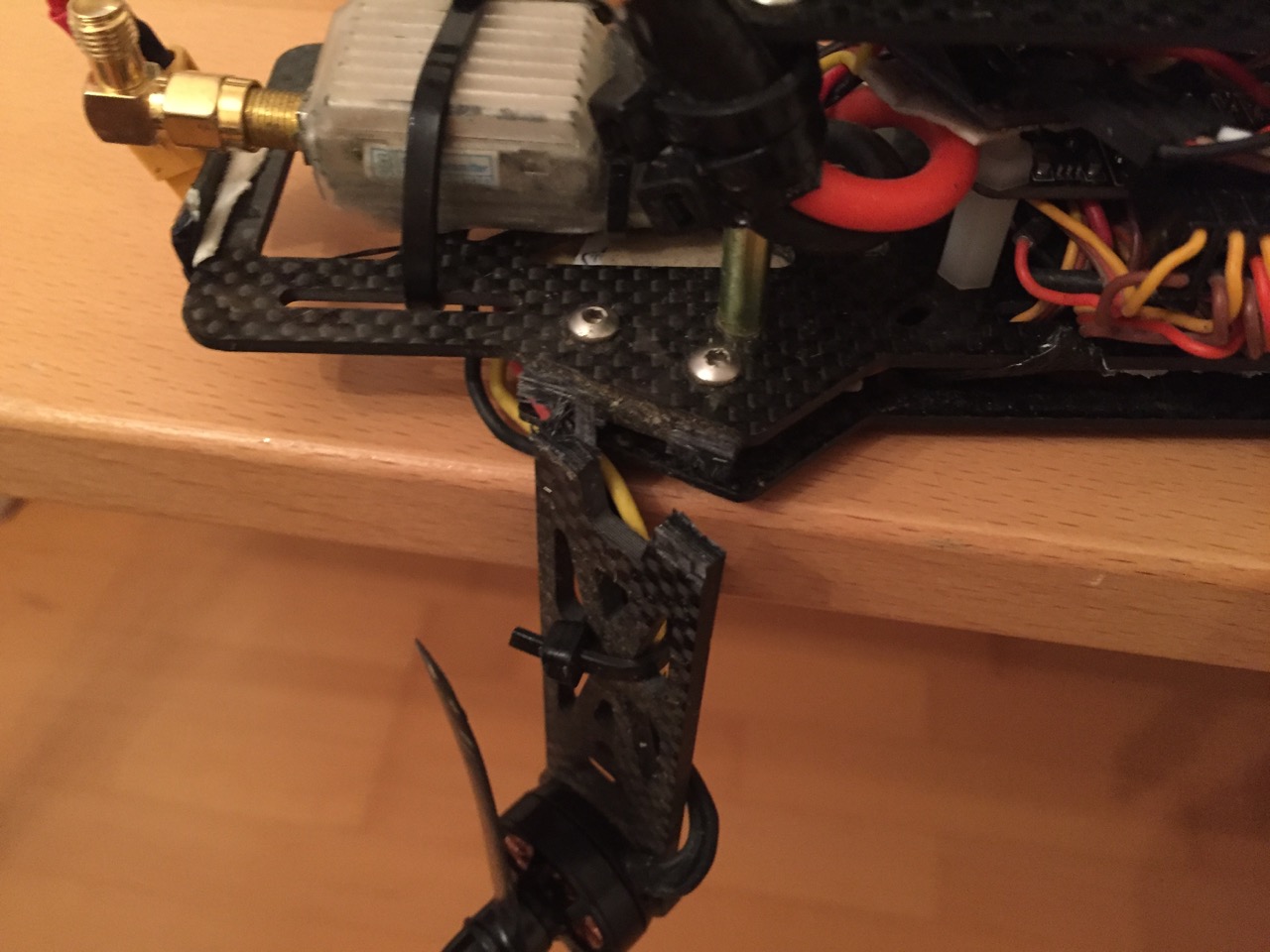
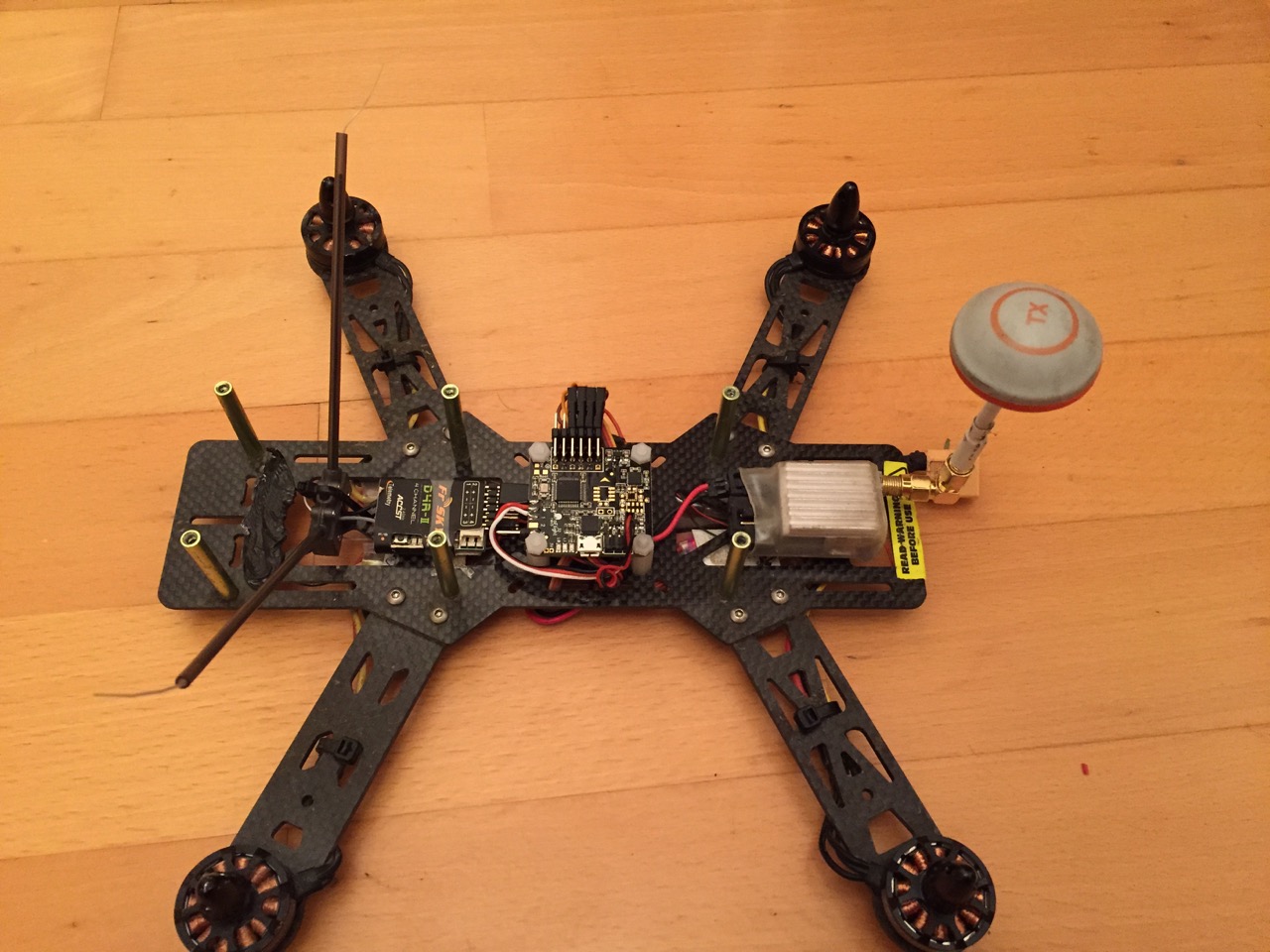
A következő képen már látszik a fő komponensek rögzítése. Helyén van a Naze32, a D4R-II vevő és a Boscam video jeladó is. A szervóvezetékek is csatlakoztatásra kerültek. A 12V-os feszültségszabályozó pedig bekerült a vezérlő alá, hogy ne foglalja a helyet. A vevő antennájának rögzítését is változtattam. Így elég jól megtartja a javasolt 90 fokos szöget a két antennaszár között, de mégsem lóg ki tulzottan a tetején, így a szállítás is kényelmesebb és zuhanásnál sem kap akkorát, mint amikor még a felső lap tetején volt elhelyezve az antennatartó. Az is fontos, hogy ebben a setupban a vevő és a Videóadó antennái jó távolra kerültek egymástól. Bár a 2,4 GHz és az 5.8 GHz elvileg nem zavarja egymást, sokan mégis a fizikai szeparációt is javasolják. Hát ezen itt nem fog múlni.
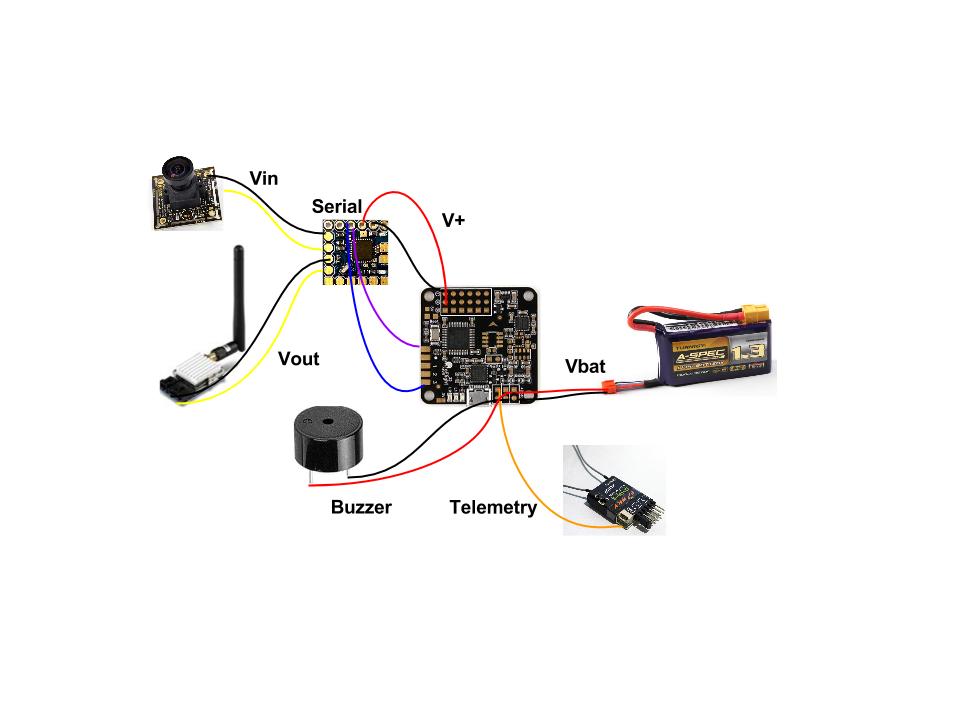
Itt pedig már rákerült az FPV rendszer a maga kábelezésével. Ez takarja a kamerát, a MinimOSD-t, a videójeladót, a videót stabil tápfeszültséggel ellátó feszültségszabályozó modult. Ezen kívül itt már csatlakoztattam a Naze32-re a akkumulátor feszültség mérésére szolgáló csatlakozót (ami közvetlenül a PDB-ről jön) és a csipogót is (Buzzer). Itt még nem került fel a telemetria tüskére a vezérlőt a vevő telemetria portjával összekötő vezeték. Erre azért van szükség, mert így két csatornán is kapok értesítést az akkumulátor feszültségéről. Egy részről a MinimOSD-n keresztül ez az információ megjelenik az élőképen, másrészről pedig a Taranis távirányítón is kijelzésre kerül, illetve hagriasztást tudok rendelni a különböző feszültségszintekhez. Emellett természetesen a Naze32 natív funkciója, hogy a beállított alacsony akkufeszültség érétknél megszólal a gépre szerelt csipogó is. Ezt azonbn nem minden esetben hallom, ezért kell a másik két módszer is. Az igazi tuti azt lenne, ha a MinimOSD által kijelzett feszültséget maga a MinimOSD mérné, ehhez azonban egy újabb csatlakozót kellett volna felforrasztanom a PDB-re. Ezt viszont most kihagytam.
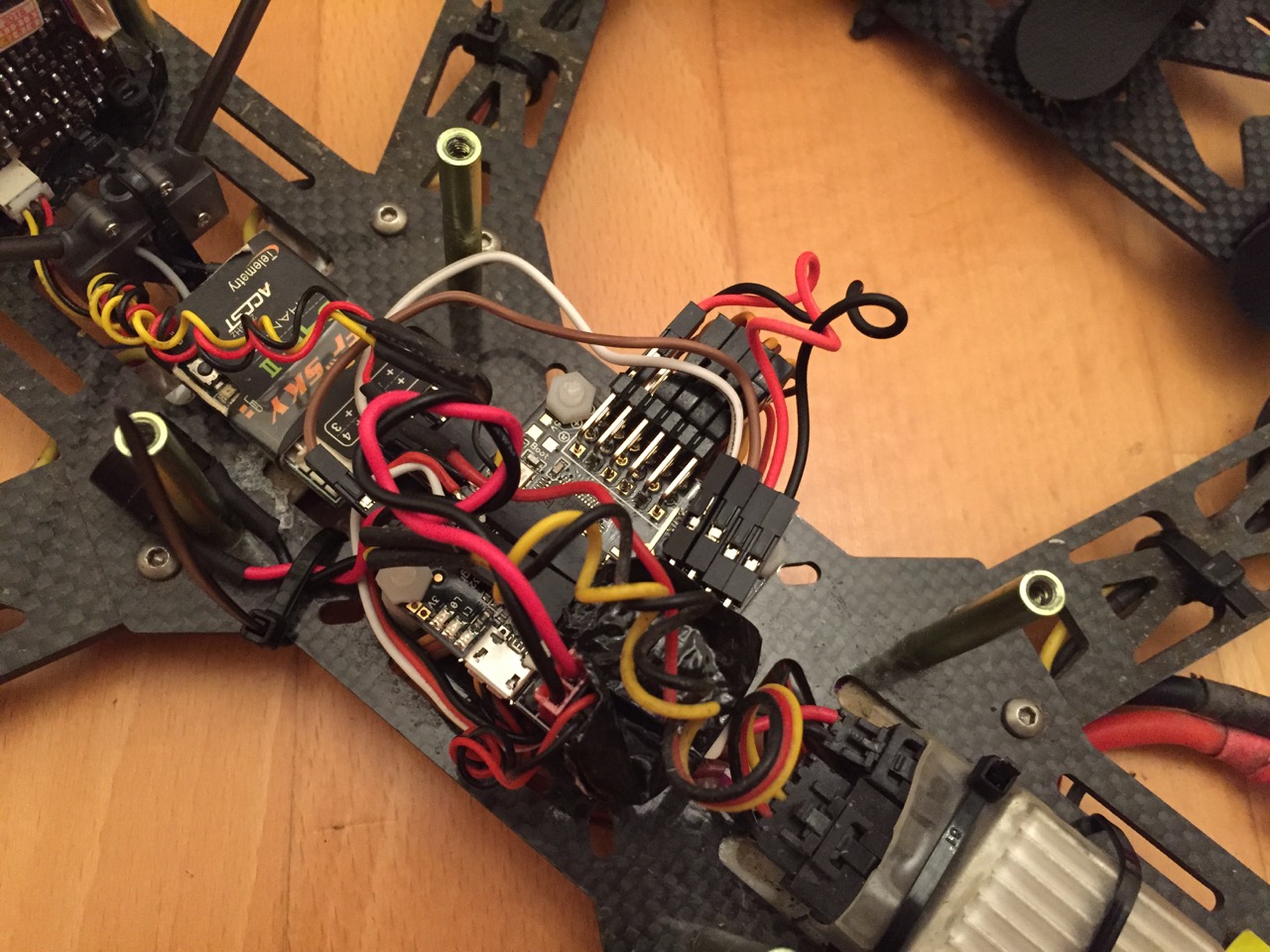
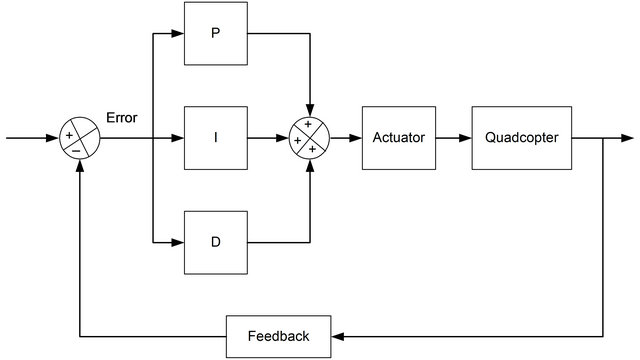
Egy kicsit érthetőbben ez így néz ki.
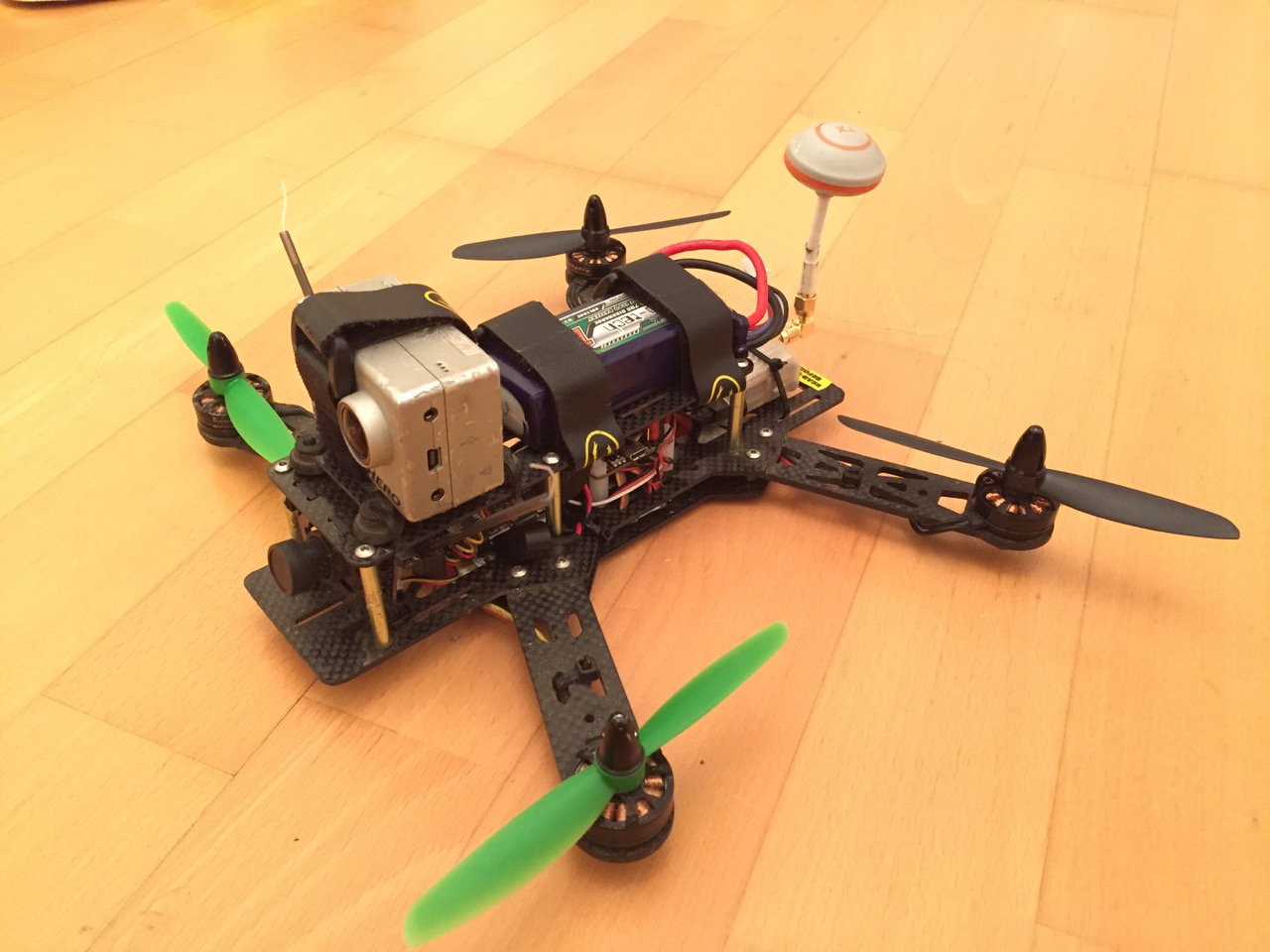
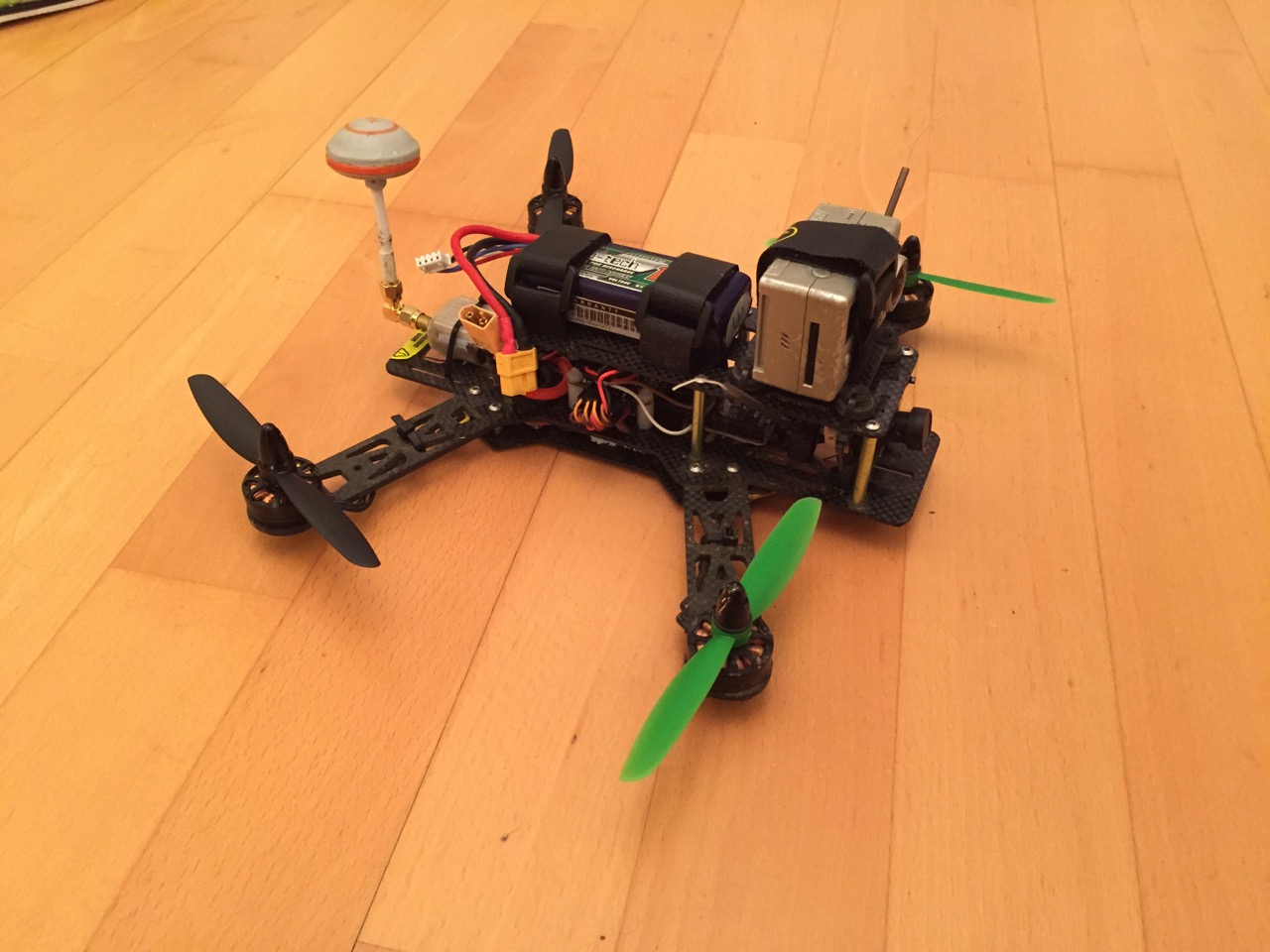
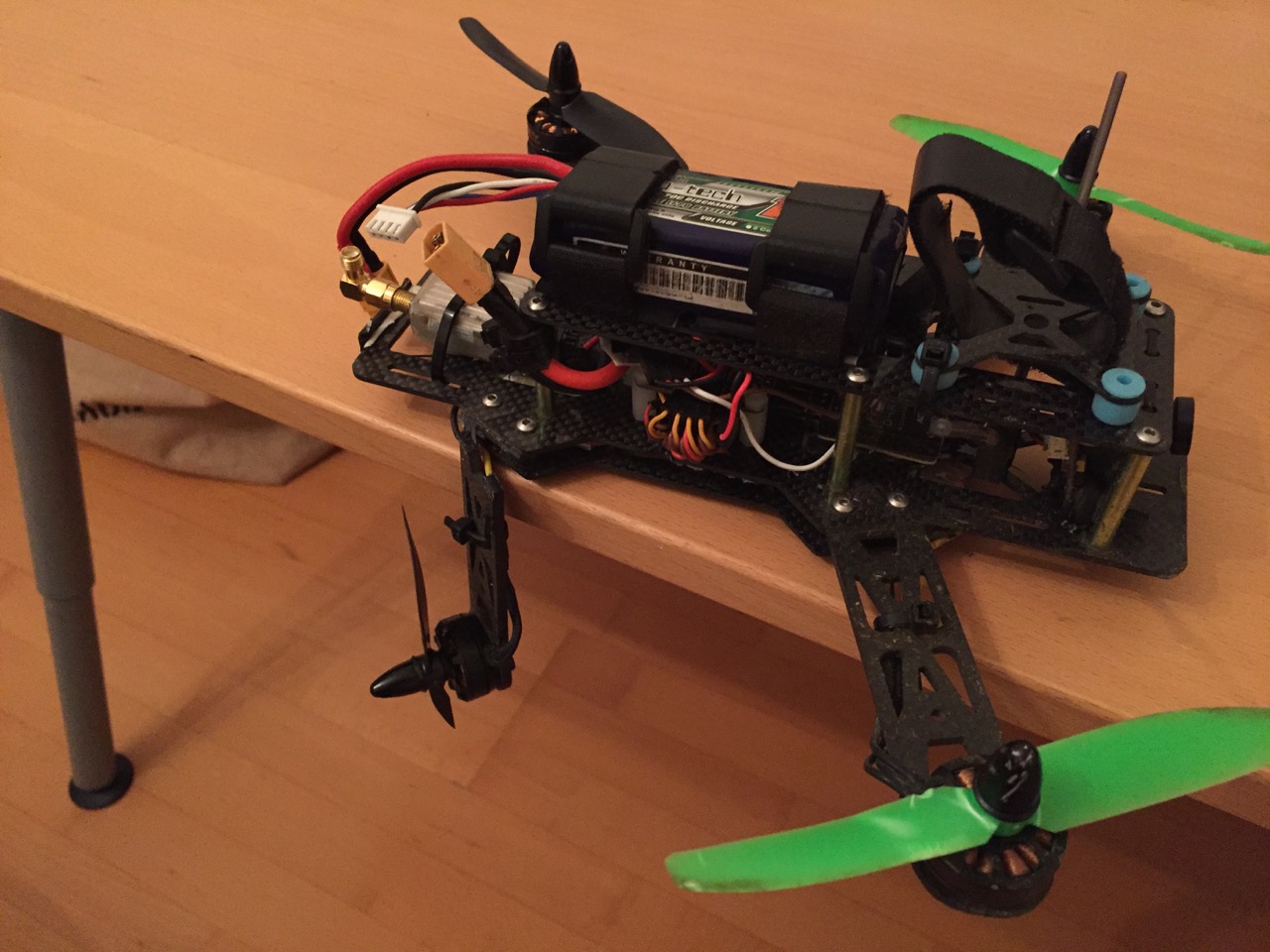
 És íme a kész mű. Ahogy látjátok végül az akkumulátor a tetejére kerül. Így pontosabban be tudom állítani a COG-t (Center of Gravity) és a gép még kiegyensúlyozottabb lett.
És íme a kész mű. Ahogy látjátok végül az akkumulátor a tetejére kerül. Így pontosabban be tudom állítani a COG-t (Center of Gravity) és a gép még kiegyensúlyozottabb lett.