A konfigurációm tervezése során sokat agyaltam a repülésvezérlő kiválasztásán. Akkor alapvetően a CC3D és a Naze32 között, pontosabban a Naze32 és BaseFlight, valamint a CC3D és az OpenPilot között választottam.
Azóta sok víz lefolyt a Dunán és roham tempóban fejlődik a Quadcopter technológia, ezért érdemesnek tartom, hogy mégegyszer átnézzük ezt a témát. A vicc az, hogy mára a kérdés nem is igazán a címben szereplő dillema, hanem a használt firmware kérdése. Na de ne szaladjunk annyira előre.
Hardverek a picaon
Ahogy korábban is mondtam, ma már mindenképpen érdemes 32-bit alapú repülésvezérlőt választani. Az FPV versenyzésre használt miniqudokhoz teljesen felesleges a komomly, barométerrel, tájólóval és komoly GPS funkcióval felszerelt vezérlő használata. A hangsúly a kis súlyon és a gyors reakcióidőn van. A piacon lévő modellek közül ma is az OpenPilot CC3D és a Naze32 Acro, illetve annak a Flip 32+ néven futó klónja a legkedveltebb. De közben megjelentek olyan - ko-processzorral - is felszerelt, kimondottan Acro versenyzésre fejlesztett vezérlők, mint az Seriously Pro F3. Ez azonban már a 65 USD kategória szemben a 15-25 dolláros CC3D-Flip-Naze32 trióval.
A két lapka részletes leírására most nem térek ki, elég legyen, hogy lényegében ugyanazt tudják. Ami említésre méltó külünbség, hogy a CC3D-nél az USB port közvetlenül a processzor buszra csatlakozik, a Naze32 esetében pedig a soros portra. Így, ha több soros portot használó eszközt próbálunk egyszerre használni, az gondot jelenthet. Cserébe viszont a Naze32-nek dedikált akkumlátor-feszültségmérő és csipogó meghajtó kimenetei vannak, mindkettő nagyon hasznos tud lenni MiniQuadnál.
A lényeg azonban mostanra már végkép a szoftver lett!
Tiszta repülés
Ebben a témában is működik a kritikus tömeg elve. Mivel az összes szoftver open source és közösségi alapon fejlesztik, ezért óhatatlan, hogy amelyiket többen használják és komolyabb fókuszt kap, az gyorsabban, jobban fejlődik. Így lehet az, hogy a Naze32-őn futó Multiwii alapú BaseFlight egy mutációja, a CleanFlight lényegében 6-9 hónap alatt meghódítótta az FPV racer világot.

A U.S. Drone Nationals-en a pilóták 90+ %-a CleanFlight-ot használt és a versenyzők között voltak a szoftver fő fejlesztői is. A forumokon rengeteg referencia és útmutató található hozzá és mára már nem csak a Naze32 Acro, illetve a Flip32+, hanem több más vezérlő, így például a CC3D is képes futtatni. Sőt, a fent emlíetett SPro F3 csúcsvezérlő már csak Cleanflightot futtat.
Határozott véleményem, hogy a CC3D OpenPilot szoftvere még most is sokkal kifinomultabb, felhasználó-barátabb és kezdők számára mindenképpen könnyebben használható, mint a CleanFlight ami még most is sok CLI paranccsal operál a tökéletes beállításhoz. Egy átlag kezdőt ez biztosan megizzaszt egy kicsit.
Viszont ugyanilyen határozott véleményem, hogy aki a hátsókerti cruising-nál egy kicsit komolyabban akar foglalkozni az FPV versenyzéssel, annak a Cleanflight a járandó út. A rendszer kávzi szabvánnyá vált a miniquad-ok területén és a fejlesztése is iszonyatosan felgyorsult ezen a téren, miközben az OpenPilot haladgat ugyan, de ott a fejlesztés hangsúlya legalább annyira a GPS-es RTH, Auto take off és egyéb funkciókon van, mint a tiszta manuális mód alapú versenyzésen.
Melyik vezérlő a nyerő ma?
Ha valakinek már van némi quad-os tunningolási, programozási tapasztalata és nem ijed meg a bonyolultabb CleanFlight-tól, akkor annak rögtön kezdésnek ezt javaslom. Ha pedig CleanFlight akkor a Naze32/Flip32 a jobb választás (kivéve, ha semmi nem számít alapon egyből az SP F3-ra megyünk rá).
Ha viszont valaki egy kicsit kifinomultabb kezdést szeretne, akkora CC3D még mindig szuper választás, mert miután az OpenPilot GCS wizzard segítségével könnyedén beállítottuk a gépet és megismerkedtünk az alapvető tunning funkciókkal, bármikor rátelepíthetjük a CleanFlightot és beleugorhatunk a mélyebb vízbe. Ráadásul, ha az sok lenne, mindig vissza lehet térni az emberközelibb OpenPilotGCS-hez.
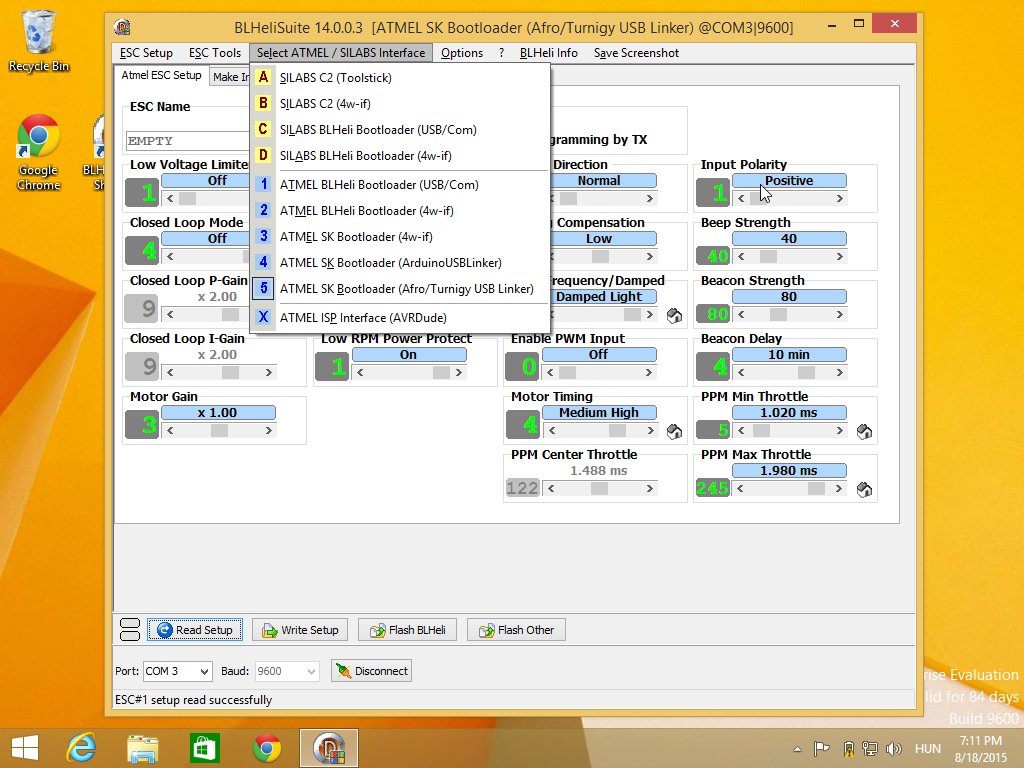
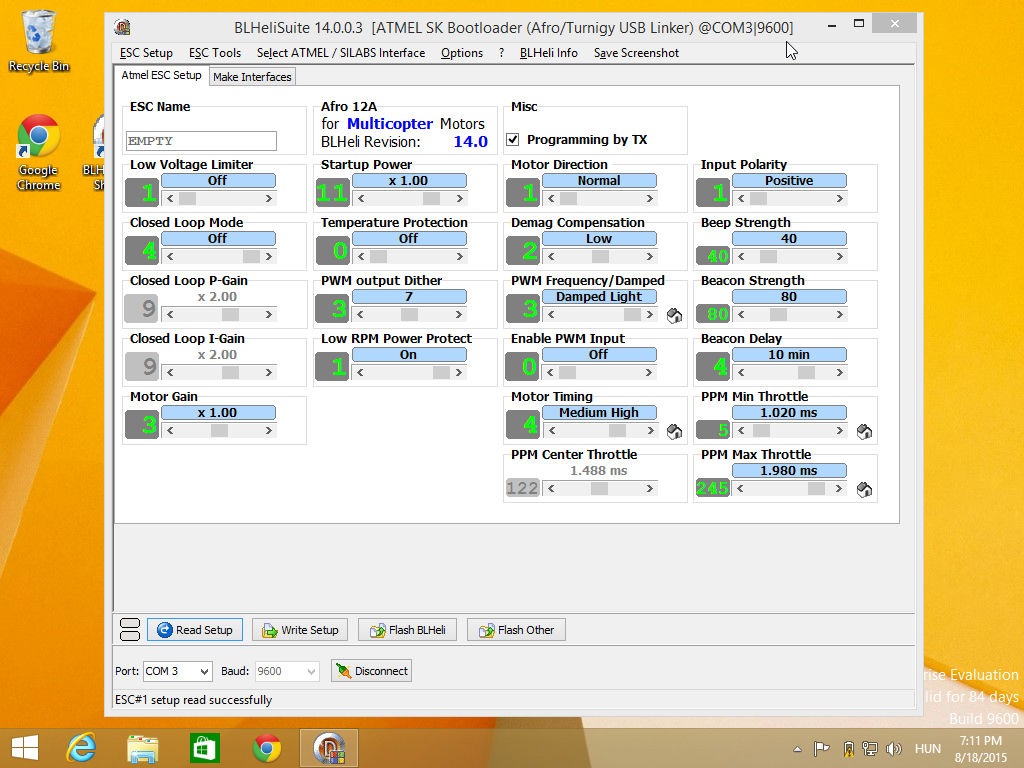
Én most kezdem feltolni a CC3D-re a CleanFlight-ot. Tapasztalatok hamarosan.