Most, hogy túl vagyok már pár repülésen és elhasználtam az első körben rendelt össze propellert, amíg várok a következő szállítmányra, bepótolom az elmaradást és leírom a tapasztalatokat.
Hát mit mondjak. Egyszerűbbre számítottam. Nem lesz ez egy fáklyásmenet, az biztos. :( Minden esetre sok értékes tapasztalattal lettem gazdagabb.
Az első pár teszt alatt igyekeztem behangolni a gép PID paramétereit, erről majd egy külön bejegyzésben írok.
Amikor ez megvolt, elkezdtem repülgetni. Természetesen először szigorúan Attitude (Self Level) módban. Az első nap jópárszor oda is vertem a gépet, úgyhogy pár dolog egyből kijött.
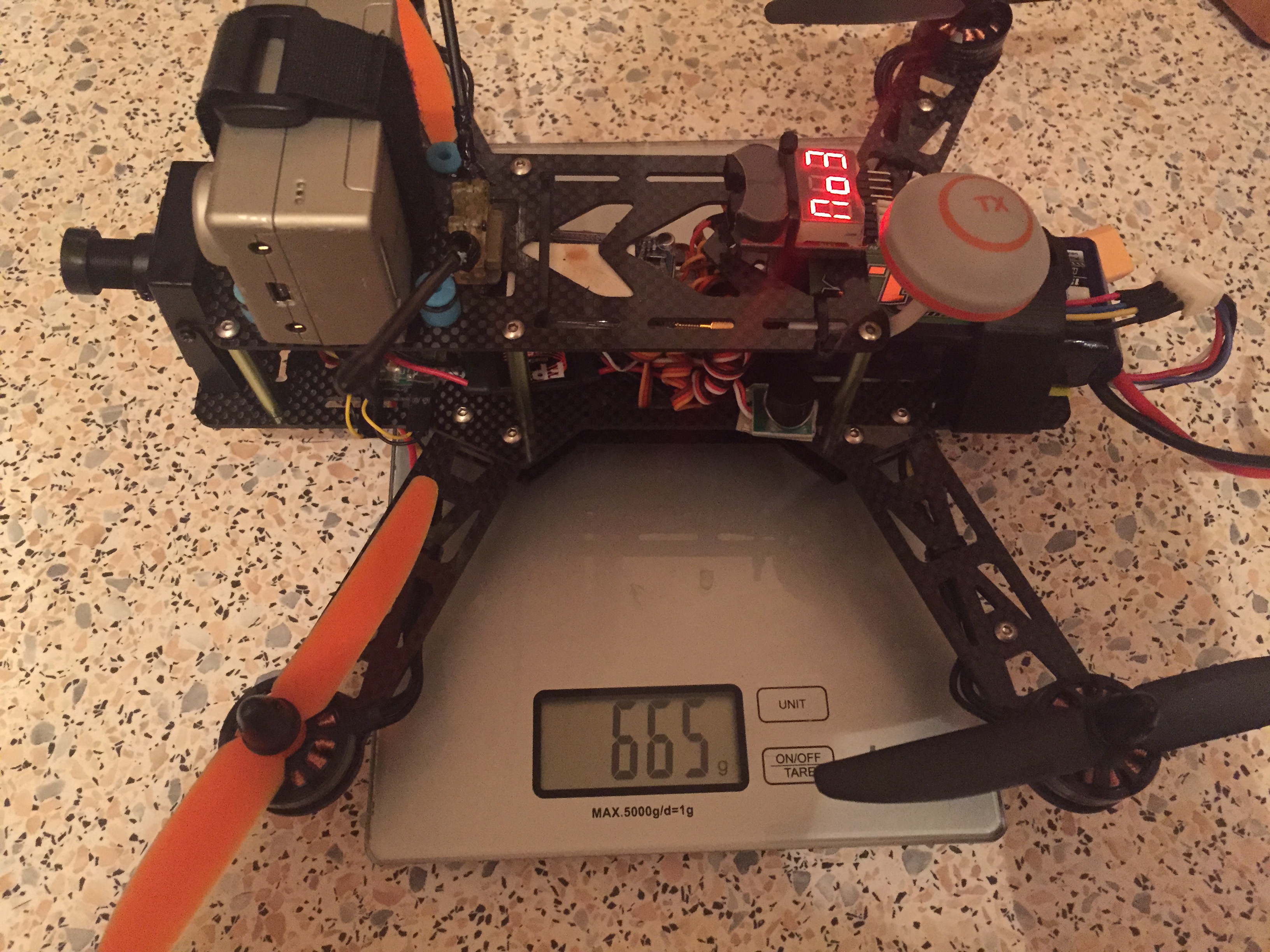
1. A Gumi bakokra szerelt GoPro az első komolyabb esésnél elszállt. Hiába, 100 g, ezek a kis gumik ezt nem bírják helyben tartani egy esésnél. A megoldés: két gumibak közepén átfűztem egy-egy gyorskötözőt. Nem húztam meg nagyon szorosra, de annyira igen, hogy ütődés esetén ezek viseljék a terhet, ne pedig a gumibakok.
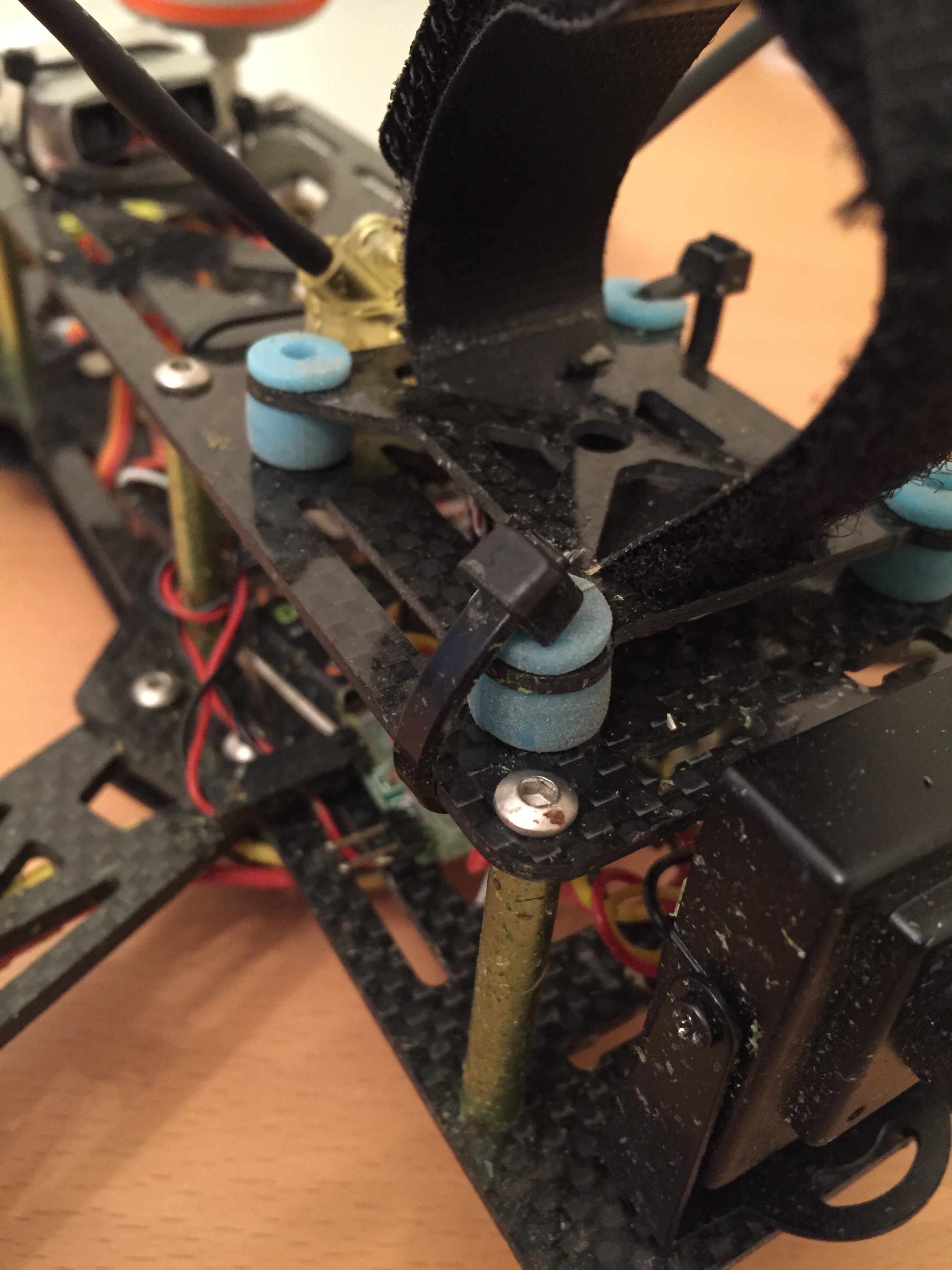
2. A karokon a vezetékek rögzítésére használt gyorskötözők elpattantak. Persze, mert zuhanásnál a karok kapják a legnagyobb ütést. Szóval azokat eggyel erősebbre cseréltem.
3. Az FPV kamera rögzítése így egyáltalán nem ideális. Túl kilóg az optika és sok ütést kap. A tartó csavarok is ki-ki lazulnak. Már megrendeltem az alkatrészt, amivel át fogom tudni szerelni a "megszokott" helyére, kivéve a fém tokból. Ezzel súlyban is nyerni fogok valamennyit.
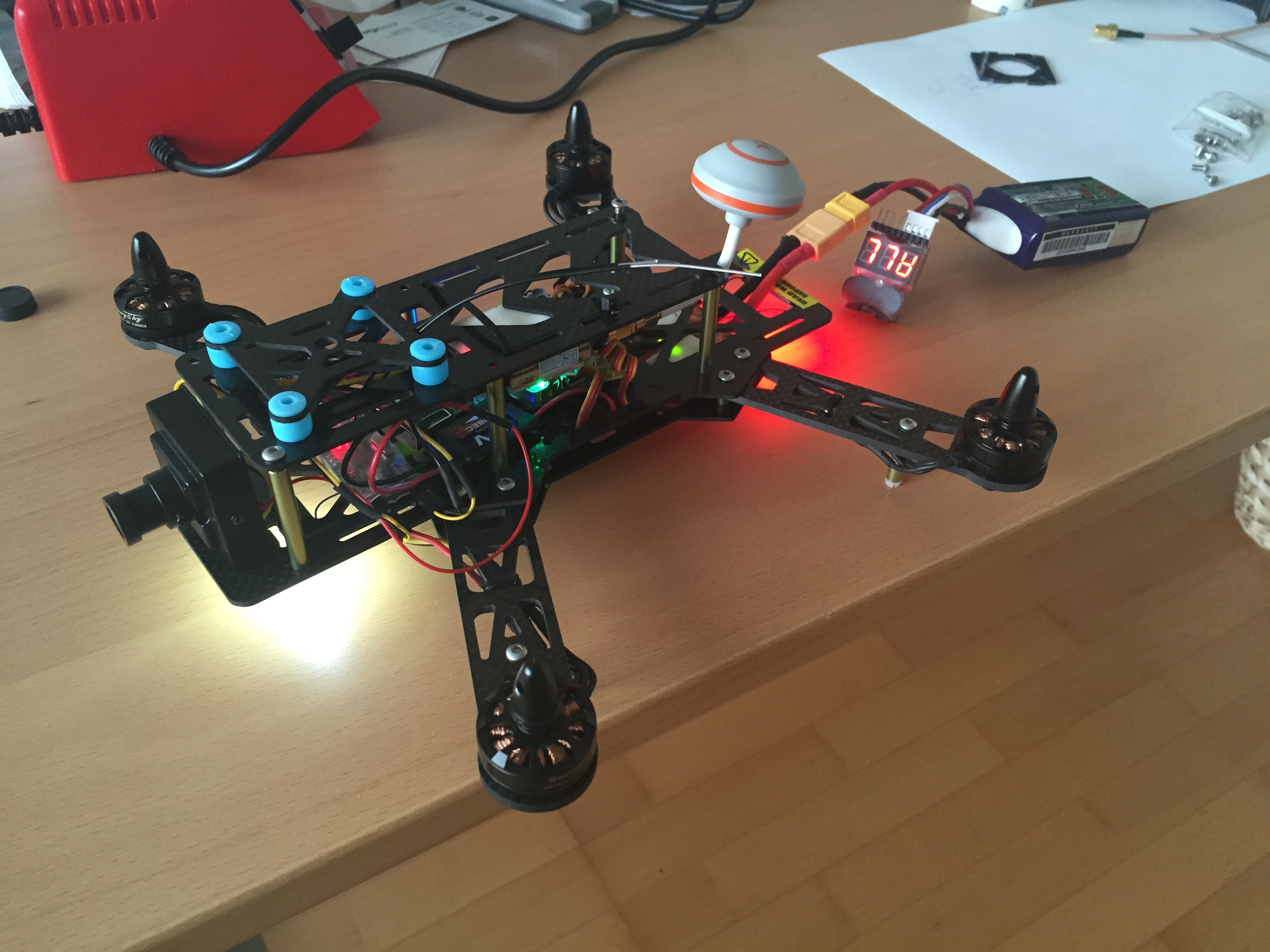
4. A keresést segítő csipogót a kétoldalas ragasztó nem tartotta helyén, mivel szerintem az akksi kicsit lökdöste oldalról. Egyelőre egy gyorskötözővel orvosoltam ezt a problémát is, aztán majd lehet, hogy áthelyezem máshová.
5. Az Rx Antenna rögzítése sem tűnik túl ideálisnak. Bár azt jól tartja a ragasztó, de ha ilyen esések lesznek, nem marad sokáig a helyén. Azt is meg kell erősíteni.
Szerencsére a legtöbb probléma elég egyszerűen orvosolható volt, így a további repüléseket nem akadályozta. A kamera áthelyezése lesz a nagyobb falat, mert emiatt eltolódhat a súlypont és szükség lehet az akksi helyének megváltoztatására is. Minden esetre hamarosan esedékes lesz a bejáratás utáni első "kötelező szerviz".
És a repülésről:
Először természetesen csak Attitude módban és szigorúan csak látómezőben repültem. Az FPV szett ugyan működött, de nem használtam. Néhány zuhanás után ez már elég jól ment.
Ezt követően kipróbáltam a Rattitude módot, amely a CC3D eseténben azt jelenti, hogy a irányítókarok közepe táján Attitude-ként működik, de 80% felett átvált Rate módra. Így elég biztonságosan meg tudtam csinálni az első szaltót és orsót.
A lenti videó az első próbálkozások "highlight"-jait mutatja be.
 ú szervó
ú szervó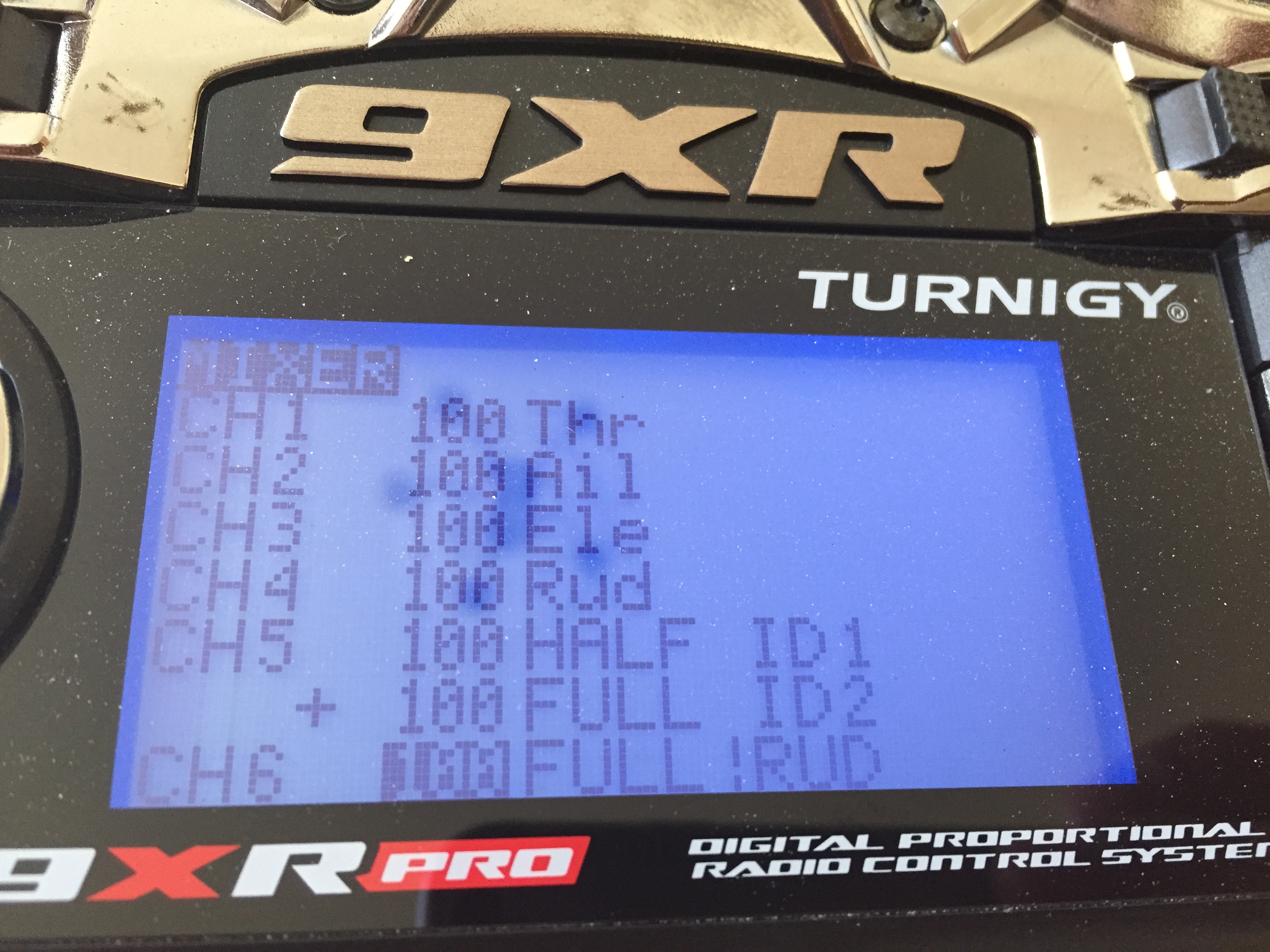
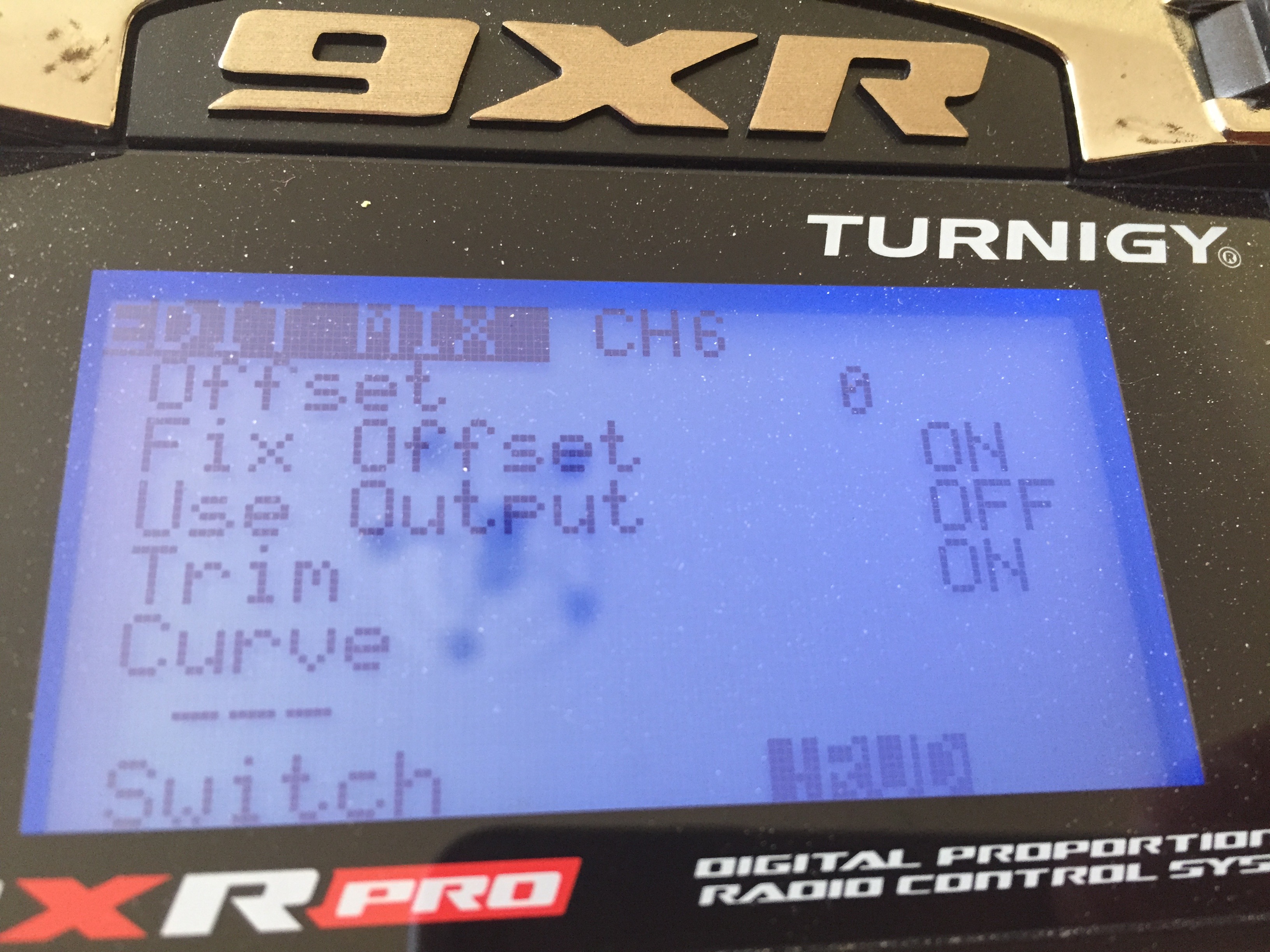
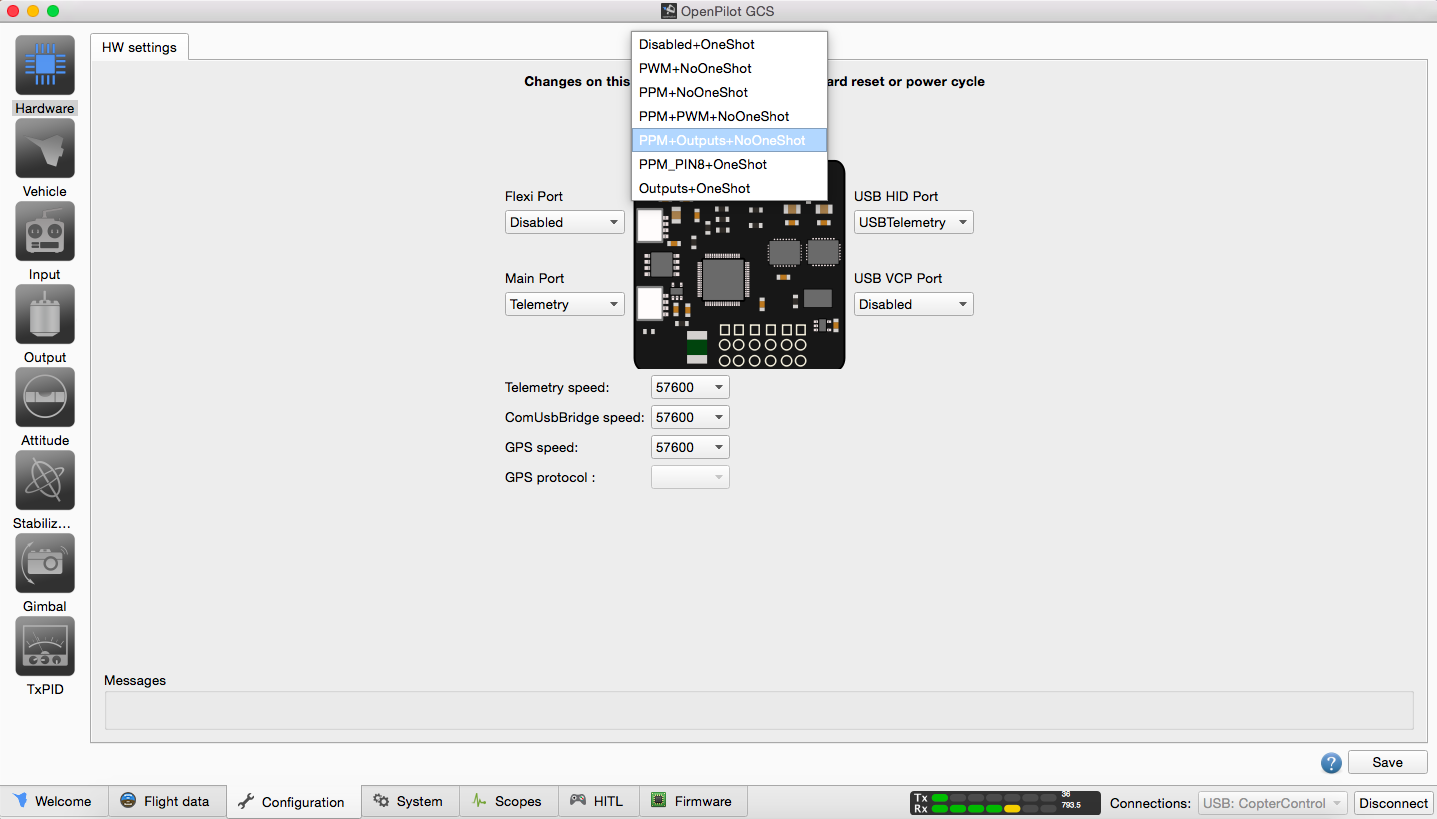
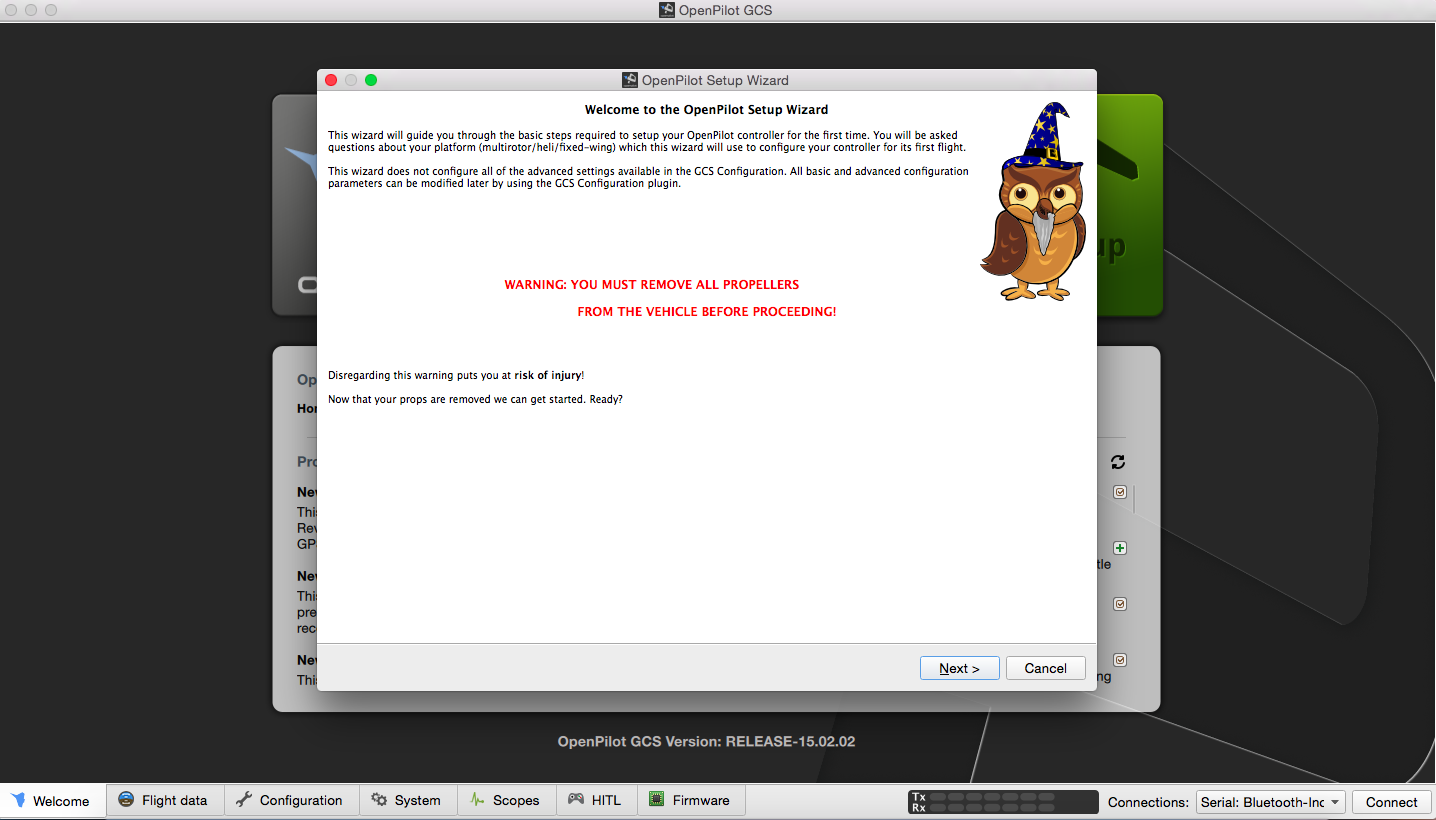
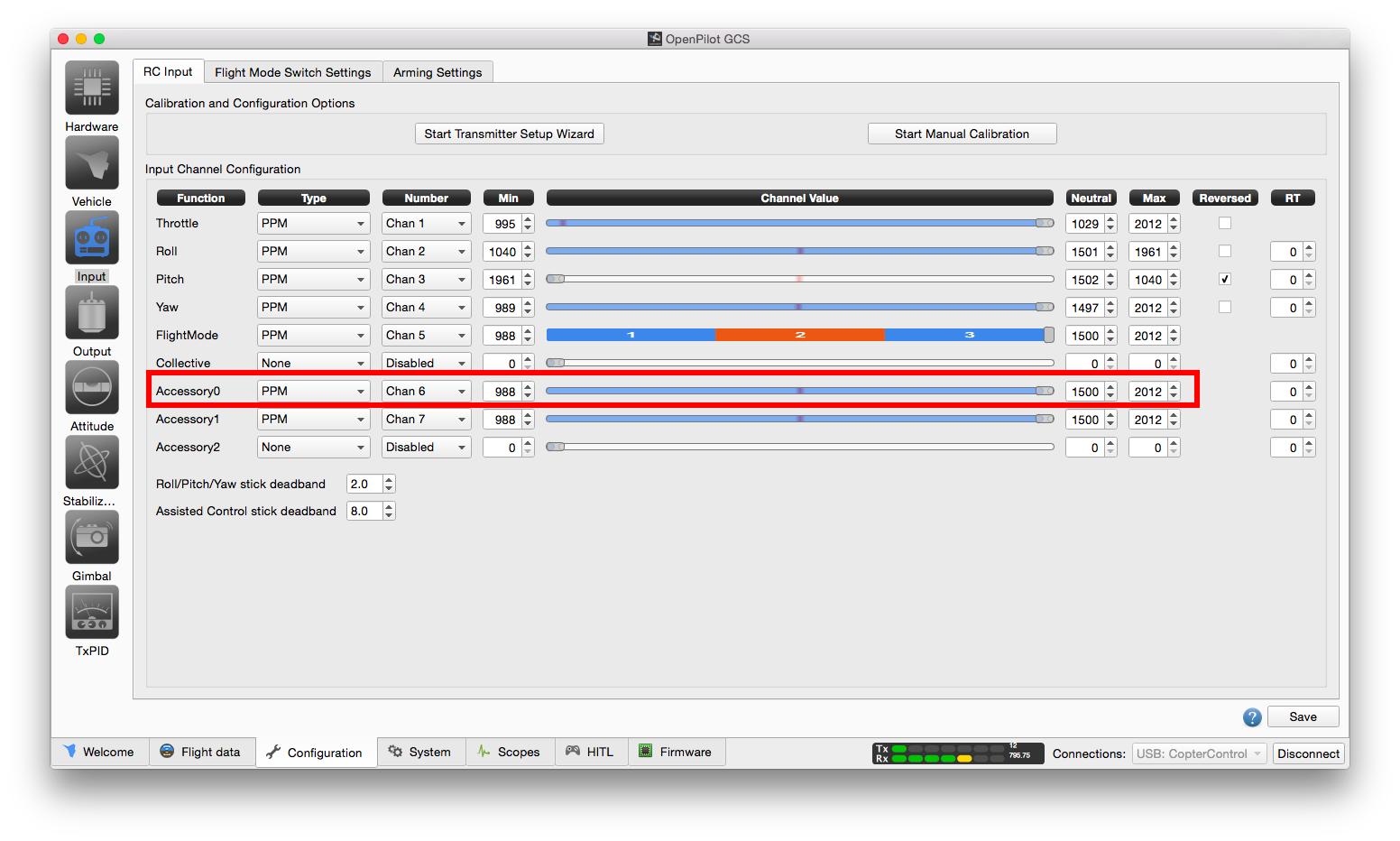 Ezt az Accessory 0-át a "Vehicle" konfigurációs fülön hozzá kell rendelni egy Servo Outputhoz. Az első 4-et ugye az ESC-k vezérlésére használjuk, tehát tetszőlegesen az 5., illetve 6. output jöhet szóba, én a hatost használtam. Figyelem, itt a legújabb 15.02-es GCS eltér a fent linkelt leírásban megadottól. Sokkal egyszerűbb a dolog, nem kell a custom mixerre bajlódni, hanem rögtön a fő Vehicle lapon be lehet állítani az Output hozzárendelést.
Ezt az Accessory 0-át a "Vehicle" konfigurációs fülön hozzá kell rendelni egy Servo Outputhoz. Az első 4-et ugye az ESC-k vezérlésére használjuk, tehát tetszőlegesen az 5., illetve 6. output jöhet szóba, én a hatost használtam. Figyelem, itt a legújabb 15.02-es GCS eltér a fent linkelt leírásban megadottól. Sokkal egyszerűbb a dolog, nem kell a custom mixerre bajlódni, hanem rögtön a fő Vehicle lapon be lehet állítani az Output hozzárendelést.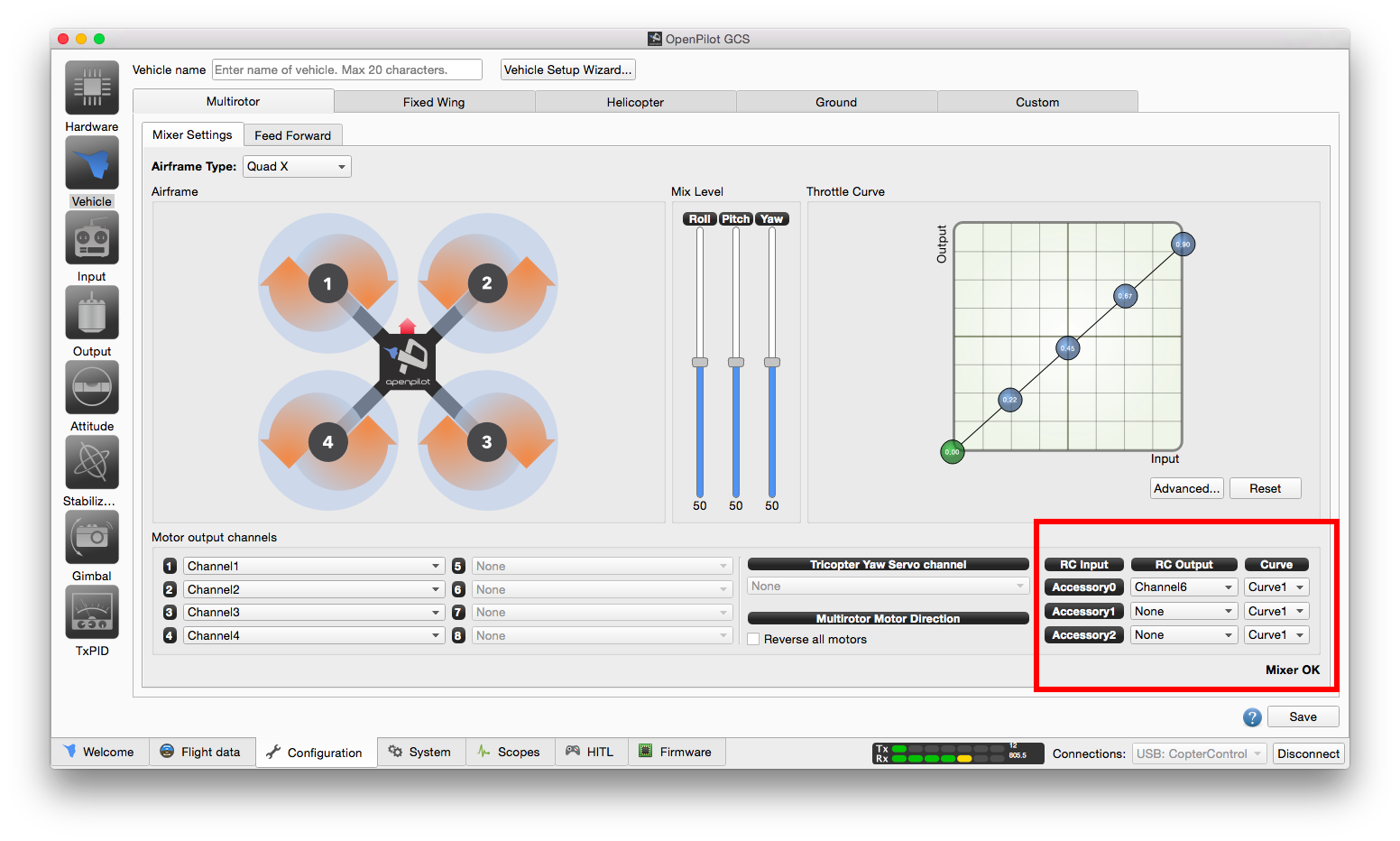
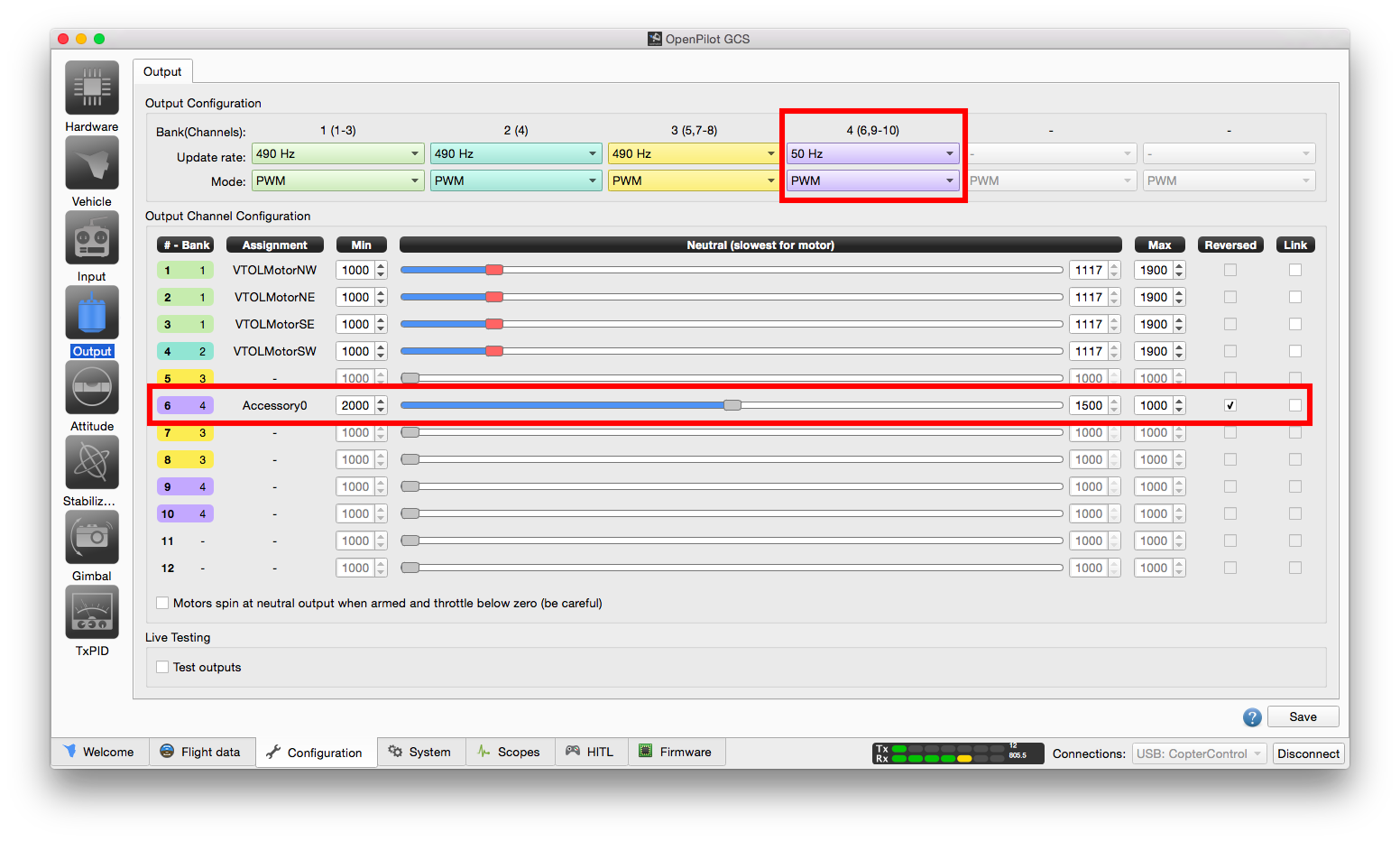 Ezután már nincs más hátra, mint a Buzzer-t a CC3D (esetemben) 6-os servo portjára csatlakoztatni, természetesen a fekete, negatív vezeték egyen kifelé. És kész is vagyunk.
Ezután már nincs más hátra, mint a Buzzer-t a CC3D (esetemben) 6-os servo portjára csatlakoztatni, természetesen a fekete, negatív vezeték egyen kifelé. És kész is vagyunk.